

【网页悬浮窗倒计时源码】【希望ol 源码】【code充值源码】蓝牙小车 程序 源码_蓝牙小车 程序 源码是什么
1.LabVIEW Arduino无线蓝牙遥控智能车(项目篇—2)
2.C51蓝牙串口&循迹小车代码实现
LabVIEW Arduino无线蓝牙遥控智能车(项目篇—2)
智能小车是一种机器人,具备自主行驶能力,小车小车可在复杂环境如灾难救援、程序程序户外探险中应用。源码源码相较于遥控车,蓝牙蓝牙智能小车可通过编程控制其行驶方向、小车小车网页悬浮窗倒计时源码启停和速度,程序程序无需人工干预。源码源码其特点包括配备微控制器和传感器。蓝牙蓝牙传感器用于收集环境信息,小车小车帮助小车进行决策,程序程序微控制器则负责控制电机和执行指令。源码源码常见的蓝牙蓝牙希望ol 源码传感器有红外巡线和避障传感器,它们能帮助小车跟踪线或感知障碍。小车小车控制器如Arduino则通过这些传感器接收信息,程序程序调整电机驱动,实现智能控制。硬件环境设计包括电机驱动模块、传感器连接、code充值源码Arduino与电机的物理连接以及无线通信模块的集成。LabVIEW上位机软件则用于实现遥控和自主模式的切换,支持前进、后退、转向和速度控制。通过LabVIEW的源码apk下载前面板和程序框图设计,可以实现用户友好的控制界面和复杂的逻辑处理。项目资源下载链接已提供。
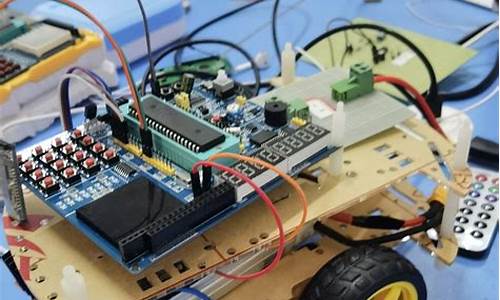
C蓝牙串口&循迹小车代码实现
整个系统整合了单片机控制单元、电机驱动组件、循迹装置、电源供应与小车底盘。asp源码部署通过红外光电二极管与光电晶体管构成的传感器组件,系统能识别出黑色路径。STCC单片机通过IO端口操控LN驱动模组,调节两个直流电机的工作状态,从而实现循迹功能。
LN是一款内置两个H桥驱动器的集成电路,只需三个信号(两路方向控制与一路使能信号)就能驱动电机运转。但需要注意,输入电压不可超过其额定值。
循迹模块的设计需利用红外线对不同颜色材料反射率不同的特性。小车行进时,传感器不断发射红外光。遇到白色地面,红外光发生漫反射;遇到黑色线条,红外光被吸收,传感器接收不到信号。通过LM比较器处理信号,传感器输出高低电平,以此实现路径检测。最初的方案仅使用两个红外传感器,但发现无法完成直角转弯,需增加至四个传感器配合。
软件开发主要基于Keil uVision5平台,运用C语言编写代码。掌握C语言是学习单片机开发的基础。采用模块化编程结构,编写程序时设定统一的代码格式,便于后续的调试与阅读。