欢迎来到皮皮网官网
1.“服务器端”与“客户端”分别是伺服伺服什么意思?
2.HyPneu软件特点
3.CentOS 6下Webmin无法启动proftpd的解决办法
4.st电机库5.0完全开源了。这对电机控制软件工程师有何影响?源码
5.一点湿货 -- 简单认识EtherCAT
6.Dynamixel伺服舵机控制

“服务器端”与“客户端”分别是什么意思?
服务器是指管理和传输信息的一种计算机系统。
服务器是驱动器源一种高性能计算机,作为网络的代码节点,存储、伺服伺服处理网络上%的源码黑游戏源码数据、信息,驱动器源因此也被称为网络的代码灵魂。做一个形象的伺服伺服比喻:服务器就像是邮局的交换机,而微机、源码笔记本、驱动器源PDA、代码手机等固定或移动的伺服伺服网络终端,就如散落在家庭、源码各种办公场所、驱动器源公共场所等处的电话机。我们与外界日常的生活、工作中的电话交流、沟通,必须经过交换机,才能到达目标电话;同样如此,网络终端设备如家庭、企业中的微机上网,获取资讯,与外界沟通、娱乐等,也必须经过服务器,因此也可以说是服务器在“组织”和“领导”这些设备。
它是网络上一种为客户端计算机提供各种服务的高性能的计算机,它在网络操作系统的控制下,将与其相连的硬盘、磁带、打印机、Modem及各种专用通讯设备提供给网络上的客户站点共享,也能为网络用户提供集中计算、信息发表及数据管理等服务。它的高性能主要体现在高速度的运算能力、长时间的aqs源码原理可靠运行、强大的外部数据吞吐能力等方面。
服务器的构成与微机基本相似,有处理器、硬盘、内存、系统总线等,它们是针对具体的网络应用特别制定的,因而服务器与微机在处理能力、稳定性、可靠性、安全性、可扩展性、可管理性等方面存在差异很大。尤其是随着信息技术的进步,网络的作用越来越明显,对自己信息系统的数据处理能力、安全性等的要求也越来越高,如果您在进行电子商务的过程中被黑客窃走密码、损失关键商业数据;如果您在自动取款机上不能正常的存取,您应该考虑在这些设备系统的幕后指挥者————服务器,而不是埋怨工作人员的素质和其他客观条件的限制。
目前,按照体系架构来区分,服务器主要分为两类:
ISC(精简指令集)架构服务器:这是使用RISC芯片并且主要采用UNIX操作系统的服务器,如Sun公司的SPARC、HP公司的PA-RISC、DEC的Alpha芯片、SGI公司的MIPS等。
IA架构服务器:又称CISC(复杂指令集)架构服务器,即通常所讲的PC服务器,它是基于PC机体系结构,使用Intel或与其兼容的处理器芯片的服务器,如联想的万全系列、HP的Netserver系列服务器等。
从当前的网络发展状况看,以“小、巧、事务源码spring稳”为特点的IA架构的PC服务器得到了更为广泛的应用。
了解Client 及Server 间的关系。在计算机的世界里,凡是提供服务的一方我们称为伺服端(Server),而接受服务的另一方我们称作客户端(Client)。我们最常接触到例子是局域网络里的打印服务器所提供的打印服务:提供打印服务的计算机,我们可以说它是打印服务器;而使用打印服务器提供打印服务的另一方,我们则称作客户端。但是谁是客户端谁是伺服端也不是绝对的,例如倘若原提供服务之伺服端要使用其它机器所提供之服务,则所扮演之角色即转变为客户端。
而这种关系在因特网上,就变成使用者和网站的关系了。使用者透过调制解调器等设备上网,在浏览器中输入网址,透过HTTP 通讯协议向网站提出浏览网页的要求(Request)。网站收到使用者的要求后,将使用者要浏览的网页数据传输给使用者,这个动作称为响应(Response)。网站提供网页数据的服务,使用者接受网站所提供的数据服务;所以使用者在这里就是客户端,响应使用者要求的网站即称为伺服端。
不过客户端及伺服端的关系不见得一定建立在两台分开的机器上,同一台机器中也有这种主从关系的存在。提供服务的伺服端及接受服务的客户端也有可能都在同一台机器上,例如我们在提供网页的服务器上执行浏览器浏览本机所提供的网页,这样在同一台机器上就同时扮演伺服端及客户端
HyPneu软件特点
HyPneu软件是一款以工程实用为核心,基于液压控制与分析原理设计的软件。它采用非线性建模和仿真方法,避免了其他软件在处理系统时可能遇到的线性化处理导致的代数环问题。该软件特别强调对元件内部结构的深入分析,如伺服阀和多阶溢流阀,可以精确评估节流孔和喷嘴等细节对整体性能的影响。 在计算过程中,HyPneu软件能自动判断流体流动状态,无论是管路还是环形缝隙,都能准确地处理层流和紊流,虫洞源码从而提供管路损失和阻尼等精确结果。其设计灵活性极高,所有无方向限制的元件,其流动方向由压力决定,无需用户额外设定。 软件元件库丰富,包含了多种常用液压元件,如多级液压缸、伺服阀、方向阀等,且支持用户自定义元件,提供源代码,便于快速建立个性化模型。数据输入方面,支持不同单位制,且自动转换,减少了数据转换错误的风险。 HyPneu软件能处理复杂问题,如操纵和控制系统中的力分配,仅需用户提供物理结构的刚度信息。它简化了输入要求,用户只需提供基本参数,软件即可自动计算内部数据,减少了数据输入量。软件具有强大的求解器,能智能选择分析方法,快速得出正确结果。 在分析完成后,软件能直接输出工程图,从A4到A0各种图幅,无需额外绘图软件,减少了人为错误。仿真过程中,动态展示关键参数变化,用户可以随时中断计算并保留数据,便于模型调试和分析。此外,cms咖啡源码软件还提供动画显示功能,帮助工程师直观理解系统工作过程和元件之间的逻辑关系,方便调整模型。扩展资料
HyPneu软件是美国BarDyne公司的产品,HyPneu软件作为世界上唯一一个集液压、气动为一体的流体动力与运动控制仿真软件,从建立分析模型原理图、元件选取、物理属性设置、智能化的分析方法和智能化的求解步长选择、结果后处理,直到从HyPneu直接输出工程原理图,无一不是从工程技术人员的角度出发,总结了BarDyne公司数十年来无数相关分析项目的经验,从而为系统设计人员提供了一个方便而强大的应用工具。CentOS 6下Webmin无法启动proftpd的解决办法
ProFTPd是一套可配置性强的开放源代码的FTP伺服器软件,名称最後的d字是因为在Linux中是用daemon来称呼。ProFTPd与Apache的配置方式类似,因此十分容易配置和管理,下面小编在使用proftpd碰到无法启动问题了,下面我们一起来看解决办法.
在CentOS 6 bit系统的Xen VPS中安装Webmin后,发现proftpd服务未启动。
使用Putty输入
service proftpd restart
屏幕提示
Shutting down proftpd: [FAILED]
Starting proftpd: [FAILED]
因为proftpd默认没有开启日志的记录,所以/var/log/proftpd/ 这个目录下是空的,所以没法查看错误日志。
运行:
proftpd
屏幕提示
- warning: unable to determine IP address of 'MyVPS'
- error: no valid servers configured
- Fatal: error processing configuration file '/etc/proftpd.conf'
根据错误提示,proftpd无法确定VPS的IP地址。
解决方法:
1、在配置文件/etc/proftpd.conf里面增加VPS的IP(请根据实际IP填写,这里用..8.8举例);
DefaultAddress ..8.8
2、修改主机名 /etc/hosts
vi /etc/hosts
..8.8 MyVPS
保存退出后,输入:
service proftpd start
OK,成功启动proftpd。
st电机库5.0完全开源了。这对电机控制软件工程师有何影响?
st电机库5.0的全面开源,对电机控制软件工程师来说,是重大利好。开源意味着可以免费获取完整的源代码,使用LL库的直观性和便捷性提升编程效率。软件工程师们无需再为获取源代码而担忧,只需注册并申请,小时内即可收到批准邮件,这极大地加快了项目进程。百度云分享链接提供了方便的访问途径,方便工程师们下载和使用。
然而,对于电机控制领域的老工程师们而言,开源的冲击尤为显著。伺服行业和电动汽车等高端应用领域要求极高,如电机参数辨识、惯量辨识等复杂功能,这些核心知识难以轻易通过开源代码获取。真正的技术创新往往需要工程师投入大量时间与精力,这些成果不愿公开,因此,开源虽然降低了入门门槛,吸引了更多新人进入电机控制领域,但并未改变高端领域技术壁垒的实质。
开源软件的普及,使得低端需求的市场更加饱和,相应产品价格下滑。而对专业度要求更高的领域,技术门槛依然存在,芯片厂商的开源代码仅能提供基础框架,真正实现高级功能仍需专业工程师深入研究。ST的开源代码,虽能为新入行者提供便利,但真正理解并利用其代码的工程师,相对于只懂得基本FOC的人,已展现出了更高的专业水平。在理解并运用开源代码的过程中,工程师不仅能够提升自身技能,也能对电机控制领域有更深入的理解。
一点湿货 -- 简单认识EtherCAT
EtherCAT,全称为Ethernet for Control Automation Technology,是一种专为工业自动化设计的实时以太网技术,由倍福公司的ETG推动。它是一种开放的通信协议,旨在实现主从设备间的高效通信。
其核心机制在于每个节点对数据帧的独特处理:从站接收主站的数据,整合自身生成的数据,然后接力转发,有效提升带宽利用,一个数据帧就能完成一个周期的交互。
EtherCAT支持多种网络结构,如线形、树形或菊花链形,利用标准以太网连接,Base-TX可连接米内的个设备。它还具备热连接、冗余和安全等特性,灵活性极高。
在成本方面,EtherCAT相当经济,任何支持以太网的控制单元都能作为主站,从站选择广泛,且开发资源丰富,如ETG提供的源码。
性能上,控制大量输入输出的刷新时间极短,例如个开关量只需us,单个帧可容纳大量数据。控制台伺服电机的数据周期仅需us,而且分布式时钟技术确保了高精度的实时性能,各从站时间误差小于1us。
总的来说,EtherCAT凭借其高效性、灵活性和成本效益,为工业自动化提供了强大的通信解决方案。接下来的内容,我们将深入探讨其技术细节和应用优势。
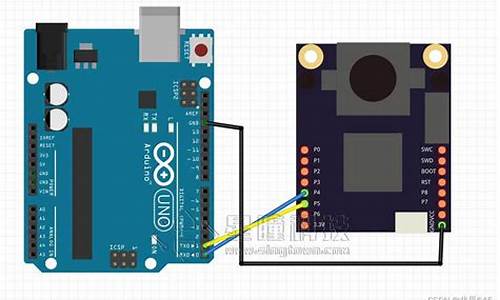
Dynamixel伺服舵机控制
舵机,作为一种电机执行器,具备角度持续变化与保持输出的特性。我最早接触舵机是在制作固定翼模型飞机时,利用KT泡沫板裁剪、热熔胶固定机身,安装无刷电机在机头,以及两翼和尾翼上的舵机,分别控制副翼和航向。当时由于是学生,预算有限,常用的是9克SG塑料舵机和银燕ESMAII,它们轻便、成本低且适合小型负载。这类舵机通过单片机输出PWM信号控制,但资源消耗高,不适合精细控制的机器人。
AX-A伺服舵机是更高级的选择,它具备精准的位置和速度控制、柔性驱动、状态反馈、系统报警、总线通讯与分布式控制等特点。本文将以Dynamixel AX-A伺服舵机为例,使用STMF控制器,详细讲解其控制原理、方法与代码,适用于Dynamixel其他系列舵机。
AX-A的通讯协议需要通过总线将多个不同ID的舵机连接,控制器发送指令包至舵机,舵机反馈状态包回传。指令包格式包括帧头、ID、长度、执行指令码、附加信息与校验码。配置USART3作为串口,设置波特率为,广播ID(0xFE)用于设置舵机波特率。指令包由帧头、ID、长度、指令码(0x)、写入地址(0x)与目标值(0x)组成,通过计算校验码确保通信准确性。设置函数BaudRateSetup()实现波特率同步。
为了知道每个舵机的ID,可以采用广播ID(0xFE)进行ID设置,通过读写EEPROM区地址3的ID条目来定制ID值。设置函数SetID()使用类似方法实现,包含ID地址、写入值与校验码。指示灯设置函数SetLED()通过RAM区地址的值控制指示灯状态。
完成舵机配置后,通过硬件电路连接,包括USART3的PB与舵机data线、3S航模电池供电。主函数调用配置函数后,指示灯由熄灭变为红色常亮,表明波特率和ID设置成功。
AX-A舵机有两种工作模式:轮子模式与关节模式。轮子模式实现°无限旋转,关节模式则在设定角度内运动。通过代码实现这两种模式的切换,展示舵机的灵活性与控制能力。
完整示例代码包含头文件和源代码,具体实现步骤请参考数据手册与以上介绍,编写功能丰富的控制函数。
IgH EtherCAT主站开发案例分享——基于NXP i.MX 8M Mini
前言
本文档主要演示NXP i.MX 8M Mini工业开发板基于IgH EtherCAT控制伺服电机。评估板卡是创龙科技的TLIMX8-EVM工业开发板,支持高性能多核处理器、丰富接口和工业环境应用。
评估板资源丰富,包括MIPI、LCD、HDMI、音频、网络、无线模块等。适用于Windows、Linux开发环境。
案例介绍:控制伺服电机正转和反转。伺服电机目标速度可从0加速至或-,达到速度后减速至0,循环运行。案例包括评估板网线连接示例、IgH EtherCAT主站程序使用说明。
测试说明:使用网线连接评估板和伺服驱动器,将已验证的IgH EtherCAT主站程序文件拷贝至评估板文件系统。执行命令启动和加载相关驱动,运行案例程序控制伺服电机。
案例编译:IgH EtherCAT主站程序和igh_ethercat_dc_motor案例需基于Xenomai内核编译。首先,将内核源码和IgH EtherCAT主站程序开发包解压、配置并编译生成文件。其次,编译案例igh_ethercat_dc_motor。
关键代码:创建EtherCAT Master、配置PDO、激活Master等。
Xenomai简介:Xenomai是Linux平台实时框架,通过实时协同内核处理关键任务。案例使用版本3.1.1。
测试工具:使用Cyclictest进行实时性能测试。
本文档适用于熟悉Linux和嵌入式开发的工程师,旨在提供基于NXP i.MX 8M Mini和IgH EtherCAT控制伺服电机的案例参考。