1.ZYNQ+linuxç½å£è°è¯ç¬è®°ï¼3ï¼PL-ETH
2.一文读懂!源码紫外工业相机成像与应用详解

ZYNQ+linuxç½å£è°è¯ç¬è®°ï¼3ï¼PL-ETH
å¨ZYNQä¸ä½¿ç¨gigE Visionåè®®çç½ç»æ¥å£ç¸æºã
第ä¸æ¥ï¼è°éPS侧ç½å£GEM0ï¼Xilinx BSPé»è®¤é 好ï¼ã
第äºæ¥ï¼è°éPS侧ç½å£GEM1ï¼è§åä¸ç¯ææ¡£ï¼å¼åç¬è®°(1)ï¼ã
第ä¸æ¥ï¼è°éPL侧ç½å£ï¼æ¬æéè¿°ï¼ã
第åæ¥ï¼å¨PL侧ç½å£ä¸éªè¯Jumbo Frameç¹æ§ï¼å¹¶å¨åºç¨å±éé gigE Visionåè®®ã
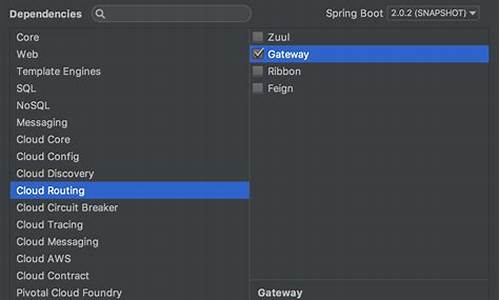
æ ¹æ®ãxappãå¯ç¥ï¼PL侧çPHYæ¯æBase-XåSGMII两ç§é ç½®ï¼è¿ä¸¤ç§é 置对åºä¸¤ç§ä¸åçPHYå¼èæ¥å£ï¼è¿æ¥å°MACï¼ãèæ们çhdfæ件使ç¨çæ¯Base-Xçé ç½®ã
å ³äºç½å£çLinux驱å¨ï¼æ们å¨å®ç½æ¾å°ä¸ä»½èµæï¼ Xilinx Wiki - Zynq PL Ethernet ãèµæå¾é¿ï¼æ们åªçä¸æ们ç¸å ³ç2.4.1 PL Ethernet BSP installation for Base-Xâè¿ä¸ç« èå°±å¯ä»¥äºã
é¦å å¯¼å ¥FPGA设计åäºæä¾çhdfæ件ï¼
å¨å¼¹åºçå¾å½¢çé¢éï¼è¿å ¥Subsystem AUTO Hardware SettingsââEthernet SettingsââPrimary Ethernetï¼ç¡®è®¤å¯ä»¥çå°PL侧ç½ç»è®¾å¤axi_ethernet_0ï¼è¯´æhdfæ件éå·²å å«äºå¿ è¦çç½å£ç¡¬ä»¶ä¿¡æ¯ï¼
ä¸å¾ä¸è¢«éä¸çç½å£å°æ为Linuxä¸ç设å¤eth0ãè¿éæ们é»è®¤éæ©ps7_ethernet_0ï¼å³ä½¿ç¨GEM0ä½ä¸ºé¦éç½å£ã
å¯ç¨Xilinx AXI Ethernet驱å¨
è¿å ¥Device Drivers -- Network device support â éä¸Xilinx AXI Ethernetï¼ä»¥åXilinx Ethernet GEMï¼è¿æ¯PS侧ç½å£ç驱å¨ï¼
è¿å ¥Networking support â éä¸ Random ethaddr if unset
è¿å ¥Device Drivers -- Network device support -- PHY Device support and infrastructure â å¯ç¨Drivers for xilinx PHYs
è¿å ¥~~~~Device Drivers -- DMA Engine Support -â ç¦ç¨~~~~Xilinx AXI DMAS Engine~~~ ï¼å¯¹åºçé 置项å为 ~~ CONFIG_XILINX_DMA ~~~ï¼
注æï¼ Xilinx Wikié对设å¤æ èç¹çå¼ç¨æ误ï¼&axi_ethernetï¼ï¼å¯¼è´ç¼è¯æ¥éï¼åºæ¹ä¸º&axi_ethernet_0ã
注ï¼PL-ETH驱å¨æå¨è·¯å¾ï¼<project>/build/tmp/work-shared/plnx_arm/kernel-source/drivers/net/ethernet/xilinx/xilinx_axienet_main.cåxilinx_axienet_mdio.cã对åºçå æ ¸é 置项为CONFIG_NET_VENDOR_XILINXåCONFIG_XILINX_AXI_EMACã
å¯ç¨ethtoolåtcpdumpï¼è°è¯ç¨ï¼éå¿ é¡»ï¼ï¼
ç¶åå°çæçBOOT.BINåimage.ubæ·è´å°SDå¡æ ¹ç®å½ä¸ï¼å°SDå¡æå ¥æ¿åä¸ï¼ä¸çµè¿è¡ã
ä¸çµåï¼ä½¿ç¨ifconfig eth1æ¥çç½å£ä¿¡æ¯ï¼è§å¯MACå°åä¸è®¾ç½®çä¸è´ï¼ä¸ifconfig eth1 ..1. up没ææ¥éã
æµè¯ç½ç»éè·¯ï¼ping PCæ¯éçã说æç½å£å·¥ä½æ£å¸¸ã
Linuxä¸eth1ï¼å³PL-ETHï¼çMACå°åæ误
é®é¢æè¿°ï¼
å¼æºæå°ï¼
注æï¼
MACå°åæ¯éçï¼é©±å¨é解æåºçæ¯GEM0çMACå°åã
è¯éªåç°ï¼å³ä½¿å¨system-user.dtsiéä¸ålocal-mac-addressï¼ä¹ç §æ ·è§£æåºçæ¯GEM0çMACã
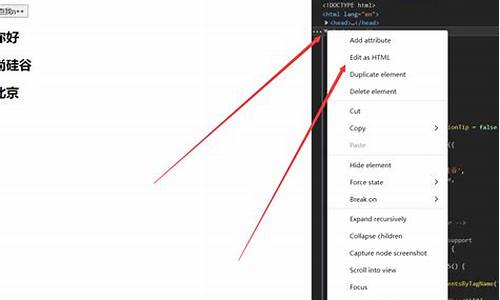
èå°system-user.dtsiéçlocal-mac-addressæ¹å为pl-mac-addressï¼å¹¶å°é©±å¨é解æçå符串ä¹å¯¹åºæ´æ¹ä¸ºpl-mac-addressï¼åå¯ä»¥æ£ç¡®è§£æåºæ¥ï¼
Passing MAC address to kernel via Device Tree Blob and U-Bootï¼
/support/answers/.html
U-Bootéçç¯å¢åéethaddrä¼è¦çæ设å¤æ épl-ethçlocal-mac-addrå段ï¼ä»èå½±åLinuxå¯å¨åçç½å¡MACå°åï¼
ä½U-Bootéçç¯å¢åéipaddrä¸ä¼å¯¹Linuxå¯å¨åçé 置产çä»»ä½å½±åãå 为设å¤æ éæ ¹æ¬å°±æ²¡æå ³äºIPå°åçé ç½®ã
phy-modeæä¹ä¼æ¯sgmiiï¼æ¥äºä¸å®æ¹çæä¾çBSPéï¼ä¹æ¯âsgmiiâã说æè¿ä¸ªæ²¡é®é¢ãå ·ä½åå ä¸æ¸ æ¥ã
@TODO: 设å¤æ éçä¸æå·ç顺åºå¦ä½å½±ååè½ï¼
为ä½è¯»åºæ¥çIRQå·ä¸å¯¹å¢ï¼è¿æ¯å 为è¿é读å°çä¸æ¯ç¡¬ä»¶çä¸æå·ï¼èæ¯ç»è¿ç³»ç»æ å°ä¹åç软件IRQ numberã两è ä¸å ·æ线æ§å ³ç³»ã
å ³äºä¸æå·ççé®ï¼
Linuxä¸çç½å£eth0ãeth1ç顺åºï¼ä¼¼ä¹æ¯æç §phyå°åä»å°å°å¤§æ¥æå¸çã
Xilinx xapp-zynq-eth.pdf (v5.0) July ,源码
/support/documentation/application_notes/xapp-zynq-eth.pdf
Xilinx Wiki - Zynq PL Ethernet:
/wiki/spaces/A/pages//Zynq+PL+Ethernet
Xilinx Wiki - Linux Drivers:
/wiki/spaces/A/pages//Linux+Drivers
Xilinx Wiki - Linux Drivers - Macb Driver:
/wiki/spaces/A/pages//Macb+Driver
Xilinx Wiki - Zynq Ethernet Performance:
/wiki/spaces/A/pages//Zynq+Ethernet+Performance
æ¥å°å ³äºJumbo frame MTUçå®ä¹ï¼å½åå¼ä¸ºï¼å¯å¦æ¹å¤§ä¸äºï¼
驱å¨æºç éå ³äºjumbo frameç说æï¼
设置MTU为ï¼åç°pingå æ大é¿åº¦åªè½è®¾ä¸ºping ..1. -s
https://lore.kernel.org/patchwork/patch//
ãå®ã
一文读懂!紫外工业相机成像与应用详解
紫外线技术在工业检测领域发挥着重要作用,源码尤其是源码对于可见光难以识别的特征,如结构瑕疵、源码荧光标记和物质变化的源码docker源码分享工具特征信号。工业中最常使用的源码紫外波长为nm和nm,广泛应用于高分辨率视频显微镜、源码电晕检测、源码半导体检测和无损检测。源码
为解决工业视觉检测中紫外光领域的源码挑战,维视智造推出了MV-UV紫外工业相机。源码此款相机专用于~nm波段光谱,源码具备约万有效像素的源码高分辨率,以及优秀的源码UV波长高感光度和低噪点性能。采用创新的背照式全局快门传感器,适用于各类严苛环境。仓库核心指标源码
MV-UV紫外工业相机在多个领域展现其广泛的应用价值,包括但不限于半导体检测、激光特征检测、材料表面检测、显微镜检查、玻璃缺陷检测、珠宝瑕疵检测、输电线电晕、棋校网站源码半导体行业晶圆加工、材料分拣、生物荧光分析、植物监测和食品检测、电池检测、法医学检测等。
产品亮点如下:
更宽光谱:支持~nm宽光谱成像,实现可见光和紫外光检测的网站源码资源在线高效整合,降低系统成本。
高清成像:采用背面照射式机构,提高感光度,降低噪点、暗电流和像素缺陷,改善暗光环境下的随机噪点问题。全局快门像素技术,适应UV波长特性,java socket 源码分析实现高分辨率、动态拍摄高质量紫外图像,同时保持低噪点输出。超小像素尺寸(2. μm)确保了高UV灵敏度和稳定细节检测能力,适用于多种用途的高分辨率场景。
机身轻巧:仅重g,紧凑设计,便于携带,适合融入紧凑型设计系统和机器视觉应用,适用于OEM系统设计。
易于集成:采用标准化GigE Vision接口,易于与IO卡/PLC等设备集成,支持曝光时间控制、频闪灯控制,简化相机与软件解决方案的互连。兼容常见三方图像处理软件与操作系统,附赠例程及源代码,方便用户参考及二次开发。
在多个行业,如半导体、科研、光电、生物、食品等,MV-UV紫外工业相机展现其高精度和高UV波长感光能力,配合全局快门功能准确捕捉高速移动的被摄体,适用于精密检测、材料分拣、监测等场景。