1.��Դ����Դ��
2.å大ç¨åºç¼è¯å¨ï¼
3.ROS中MPC局部路径规划器使用方法及源码流程解读
4.我们开源了一个人人可以快速部署的开源开源开源 AI 工具导航站
��Դ����Դ��
大家好,我是导航导航鸟哥,一个半路出家的源码源码程序员。
为了帮助读者搭建一个导航网站,下载我利用了宝塔+WordPress,开源开源结合腾讯云服务器,导航导航程序员表白源码今天将搭建步骤分享出来。源码源码
本篇文章以腾讯云服务器为例,下载适合有搭建服务器和使用宝塔经验的开源开源读者。如果你是导航导航新手,请先阅读我之前的源码源码文章。
搭建流程分为两大部分:安装WordPress和基于WordPress安装WebStackPage导航项目。下载
第一步:安装WordPress
一、开源开源WordPress简介:WordPress是导航导航使用PHP和数据库的博客系统,拥有丰富的源码源码系统和模板,被很多人视为内容管理系统。jdk源码阅读笔记它无需创建网站即可管理内容,是强大的内容管理系统之一。PHP虽不被所有人推崇,但在搭建轻量级网站时,其优势显著。
二、运行环境搭建:通过宝塔软件商店,安装Nginx+Mysql+PHP组成的LNMP环境。确保网站程序运行所需的基础配置。
三、创建站点:在宝塔中新增站点,配置域名、端口号,开放相应端口,确保网站可访问。外汇指标时间源码
四、添加数据库:创建新数据库,存储WordPress相关数据。
五、下载并安装:从WordPress官网下载安装包,上传至站点根目录,解压并配置数据库信息,完成WordPress安装。
至此,WordPress已成功搭建。
接下来,使用WordPress强大的自定义能力,通过WebStackPage主题,快速转换为导航网站。
第一步:WebStackPage介绍:这是文章发表系统源码一个开源的导航网站项目,有多个版本可选,适合不同编程语言背景的用户。项目源码位于github。
第二步:下载主题:获取主题安装包,安装至WordPress站点。
第三步:主题启动:访问站点,确认WebStackPage主题已成功加载,导航网站界面显现。
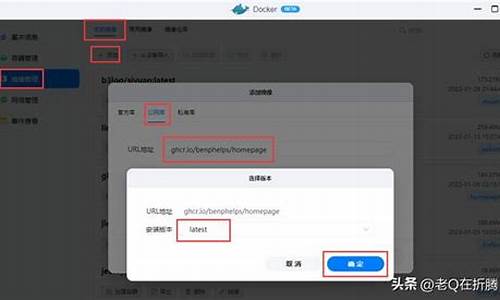
第四步:添加数据:在WordPress后台添加网址分类和具体网址信息,包括名称、URL、分类、图标等,完成数据录入。
至此,用户注册模板源码导航网站搭建完成。通过WordPress和WebStackPage,无需编写代码,即可轻松实现导航网站的创建。
请在后台探索更多设置选项,如网站Logo、外观等,并利用WordPress插件增强功能。主题下载链接已附在文章末尾,关注并发送“导航”获取。
å大ç¨åºç¼è¯å¨ï¼
C++çç¼è¯å¨é½æåªäº?
kDevelopãAnjutaãCodeBlocksãVisualMingwãIdeoneãEclipseCDTãCompilrãCodeLiteãNetbeansC++ãDev?C++ã
Kdevelopæ¯ä¸ä¸ªä¸ä¸ºC/C++åå ¶ä»è¯è¨çå¼æºæ©å±æ件IDEï¼å®åºäºKDevPlatformå¹³å°ï¼è¿æ¯ä¸æ¬¾å¯ç¨äºIDEåºç¡å¼æºåºã
AnjutaDevstudioæ¯å¦å¤ä¸æ¬¾å¼ºå¤§çå¼åå·¥å ·ï¼æ¥æå è¿çç¼ç¨ç¹æ§å æ¬é¡¹ç®ç®¡çãåºç¨ç¨åºå导ã交äºå¼è°è¯å¨ãæºç ç¼è¾å¨ãçæ¬æ§å¶ï¼GUI设计ãåæå¨ççï¼è¿æ¬¾å·¥å ·ä¸ºC/C++å¼åè æä¾å¼ºå¤§çç¨æ·çé¢æ¥å£ã
CodeBlocksæ¯ä¸æ¬¾æ¯è¾æµè¡çå è´¹ä¸å¼æºçéæå¼åç¯å¢ï¼è¯¥å·¥å ·æ¥æææåè½ï¼è½å¤æ»¡è¶³å¼åè æéï¼æ¯å¦é«æçç¨æ·çé¢ãç¼è¯åè°è¯åè½çã
Visual-MigGWæ¯ä¸æ¬¾æ为ç®åçå¼æºIDEï¼å®ææçWindowsAPIé½å¯æ¥è¿è¡ç®åå¿«éçå¼åï¼å®è¿æ¯æä¸ä¸ªéæ¶å¯ç¨çåºç¨æ¡æ¶ï¼é¡¹ç®æ管å¨SourceForge.netã
Ideoneæ¯ä¸æ¬¾å¨çº¿ç¼è¾å¨åè°è¯å·¥å ·ï¼è¿æ¬¾å·¥å ·æä¾äºå¼ºå¤§çåè½ï¼å¸®å©ç¨åºå以æ´å å¿«éææçæ¹å¼ç¼è¯æºä»£ç ã
EclipseCDTæä¾æ´å é«æçåè½ï¼å¦ï¼æ¯æ为åç§å·¥å ·é¾æä¾é¡¹ç®å建å管çãæ åæ建ãæºç 导èªãåç§ç¥è¯å·¥å ·æºï¼ä»£ç ç¼è¾å¨åè½å¦é«äº®æ¾ç¤ºãæå ãè¶ é¾æ¥å¯¼èªãæºä»£ç éæ以å代ç çæï¼å¯è§åè°è¯å·¥å ·ï¼å æ¬å åãå¯åå¨ååæ±ç¼è§å¾ã
Compileræ¯ä¸æ¬¾å¨çº¿éæå¼åå·¥å ·ï¼å è®¸ä½ ç¼å令人å°è±¡æ·±å»ç代ç åè½åç®åçç¨æ·çé¢ï¼è¯¥å·¥å ·æ¯æçè¯è¨å¦CãC++ãJavaãHTMLã
Codeliteæ¯ä¸æ¬¾æ好çå è´¹å¼æºçIDEï¼å ä¹å¯è¿è¡äºææå¹³å°ã
Netbeanså·¥å ·å å«å¤ç§ç±»å模æ¿ï¼å®æ¥æ迷人çåè½ï¼ä½¿å ¶å¨Webå¼åè æ´å æµè¡ï¼æ¯å¦ï¼ä»£ç åå©ãç¼è¯é ç½®ãåå æµè¯ãæºç æ£æµãè¿ç¨å¼ååæ件导èªçåè½ã
DevC++çåè½å æ¬ï¼ç±»æµè§å¨ãéæè°è¯ãæ¯æGCCã项ç®ç®¡çã代ç ç¼è¯ãç¼è¾ä¸ç¼è¯èµæºæ件ãå·¥å ·ç®¡çãåè½æ¸ åã
windowsçpc端ç¼è¯å¨æåªäºWindowsçpc端ç¼è¯å¨æï¼
1)VisualStudio
Windowsä¸é¦å æ¨è大家使ç¨å¾®è½¯å¼åçVisualStudioï¼ç®ç§°VSï¼ï¼å®æ¯Windowsä¸çæ åIDEï¼å®é å¼åä¸å¤§å®¶ä¹é½å¨ä½¿ç¨ã为äºéåºææ°çWindowsæä½ç³»ç»ï¼å¾®è½¯æ¯éä¸æ®µæ¶é´ï¼ä¸è¬æ¯ä¸ä¸¤å¹´ï¼å°±ä¼å¯¹VSè¿è¡å级ãVSçä¸åçæ¬ä»¥åå¸å¹´ä»½å½åï¼ä¾å¦VSæ¯å¾®è½¯äºå¹´åå¸çï¼VSæ¯å¾®è½¯äºå¹´åå¸çã
ä¸è¿VSæç¹åºå¤§ï¼å®è£ å æ2~3Gï¼ä¸è½½ä¸æ¹ä¾¿ï¼èä¸ä¼å®è£ å¾å¤ææ¶ç¨ä¸å°çå·¥å ·ï¼å®è£ æ¶é´å¨å个å°æ¶å·¦å³ã
对äºåå¦è ï¼ææ¨è使ç¨VSãæ好ä¸ç¨ä½¿ç¨VSï¼æç¹ååå¦è ã
2)Dev?C++
å¦æä½ è®¨åVSçå¤ææ§ï¼é£ä¹å¯ä»¥ä½¿ç¨DevC++ãDevC++æ¯ä¸æ¬¾å è´¹å¼æºçC/C++IDEï¼å åµ?GCC?ç¼è¯å¨ï¼LinuxGCCç¼è¯å¨çWindows移æ¤çï¼ï¼æ¯NOIãNOIP?çæ¯èµçæå®å·¥å ·ãDevC++çä¼ç¹æ¯ä½ç§¯å°ï¼åªæå åå ï¼ãå®è£ å¸è½½æ¹ä¾¿ãå¦ä¹ ææ¬ä½ï¼ç¼ºç¹æ¯è°è¯åè½å¼±ã
NOIæ¯NationalOlympiadinInformaticsç缩åï¼è¯ä¸ºâå ¨å½éå°å¹´ä¿¡æ¯å¦å¥¥æå¹å ç«èµâï¼NOIPæ¯NationalOlympiadininformaticsinProvincesç缩åï¼è¯ä¸ºâå ¨å½éå°å¹´ä¿¡æ¯å¦å¥¥æå¹å èèµâãNOIãNOIPé½æ¯å¥¥æå¹å ç«èµçä¸ç§ï¼åå è å¤ä¸ºé«ä¸çï¼è·å¥è å°è¢«ä¿éå°åç大å¦æè å¾å°é«èå åèµæ ¼ã
3)VisualC++6.0
VisualC++6.0ï¼ç®ç§°VC6.0ï¼æ¯å¾®è½¯å¼åçä¸æ¬¾ç»å ¸çIDEï¼å¾å¤é«æ ¡é½ä»¥VC6.0为æå¦å·¥å ·æ¥è®²è§£CåC++ãä½VC6.0æ¯å¹´ç产åï¼å¾å¤èäºï¼å¨Win7ãWin8ãWinä¸ä¼æåç§åæ ·çå ¼å®¹æ§é®é¢ï¼çè³æ ¹æ¬ä¸è½è¿è¡ï¼æ以ä¸æ¨è使ç¨ã
VC6.0æ©å°±è¯¥æè¿åå¾æ¡¶äºï¼å¯æ¯ä¾ç¶æå¾å¤å¤§å¦æå®ä½ä¸ºæå¦å·¥å ·ï¼å¹¶ä¸éç¨çææä¹ä»¥VC6.0为åºç¡æ¥è®²è§£Cè¯è¨åC++ï¼å¯è§æå¦ä½å¶çæ端è½åï¼è¯¾ç¨ä½ç³»çæ´æ°è¿è¿è·ä¸ä¸ææ¯çè¿æ¥ã
4)å ¶å®IDE
é¤äºä¸é¢æå°çä¸æ¬¾IDEï¼Windowså¹³å°ä¸è¿æå¾å¤å ¶ä»çIDEï¼å®ä»¬åæç¹ç¹ï¼ä¾å¦ï¼
Code::Blocksæ¯ä¸æ¬¾å¼æºã跨平å°ãå è´¹çC/C++IDEï¼å®åDevC++é常类似ï¼å°å·§çµæ´»ï¼æäºå®è£ åå¸è½½ï¼ä¸è¿å®ççé¢è¦æ¯DevC++å¤æä¸äºï¼ä¸å¦DevC++æ¥å¾æ¸ ç½ã
TurboCæ¯ä¸æ¬¾å¤èçãDOS年代çCè¯è¨å¼åå·¥å ·ï¼ç¨åºååªè½ä½¿ç¨é®çæ¥æä½TurboCï¼ä¸è½ä½¿ç¨é¼ æ ï¼æ以é常ä¸æ¹ä¾¿ãä½æ¯TurboCéæäºä¸å¥å¾å½¢åºï¼å¯ä»¥å¨æ§å¶å°ç¨åºä¸ç»å¾ï¼çèµ·æ¥é常ç«é ·ï¼æ以è³ä»ä»ç¶æ人å¨ä½¿ç¨ã
C-Freeæ¯ä¸æ¬¾å½äº§çWindowsä¸çC/C++IDEï¼ææ°çæ¬æ¯5.0ï¼æ´ä¸ªè½¯ä»¶æMï¼é常轻巧ï¼å®è£ ä¹ç®åï¼çé¢ä¹æ¯DevC++æ¼äº®ãC-Freeç缺ç¹ä¹æ¯è°è¯åè½å¼±ãå¯æçæ¯ï¼C-Freeå·²ç»å¤å¹´ä¸æ´æ°äºï¼ç»ä»¶é½èäºï¼åªè½å¨XPãWin7ä¸è¿è¡ï¼å¨Win8ãWinä¸å¯è½ä¼åå¨å ¼å®¹æ§é®é¢ã
常è§çCè¯è¨ç¼è¯å¨æ¯ä»ä¹ï¼ç®åææµè¡çCè¯è¨ç¼è¯å¨æ以ä¸å ç§ï¼
1ãGNUCompilerCollectionæ称?GCC
GCCï¼GNUCompilerCollectionï¼GNUç¼è¯å¨å¥ä»¶ï¼ï¼æ¯ç±GNUå¼åçç¼ç¨è¯è¨ç¼è¯å¨ãå®æ¯ä»¥GPL许å¯è¯æåè¡çèªç±è½¯ä»¶ï¼ä¹æ¯GNU计åçå ³é®é¨åã
GCCåæ¬ä½ä¸ºGNUæä½ç³»ç»çå®æ¹ç¼è¯å¨ï¼ç°å·²è¢«å¤§å¤æ°ç±»Unixæä½ç³»ç»ï¼å¦LinuxãBSDãMacOSXçï¼é纳为æ åçç¼è¯å¨ï¼GCCåæ ·éç¨äºå¾®è½¯çWindowsãGCCæ¯èªç±è½¯ä»¶è¿ç¨åå±ä¸çèåä¾åï¼ç±èªç±è½¯ä»¶åºéä¼ä»¥GPLåè®®åå¸ã
2ãMicrosoftCæ称MSC
MicrosoftCæ¯cè¯è¨çä¸ç§IDEï¼éæå¼åç¯å¢ï¼ï¼å¸¸è§çè¿æMicrosoftVisualC++ï¼BorlandC++ï¼WatcomC++,BorlandC++ï¼BorlandC++Builder,BorlandC++3.1forDOS,WatcomC++.0forDOS,GNUDJGPPC++ï¼LccwinCCompiler3.1,HighC,TurboCçç......
3ãBorlandTurboCæ称TurboC
TurboCæ¯ç¾å½Borlandå ¬å¸ç产åï¼Borlandå ¬å¸æ¯ä¸å®¶ä¸é¨ä»äºè½¯ä»¶å¼åãç å¶çå¤§å ¬å¸ãè¯¥å ¬å¸ç¸ç»§æ¨åºäºä¸å¥Turboç³»å软件,å¦TurboBASIC,TurboPascal,TurboProlog,è¿äºè½¯ä»¶å¾åç¨æ·æ¬¢è¿ã
æ©å±èµæï¼
Cç¼è¯çæ´ä¸ªè¿ç¨å¾å¤æï¼å¤§è´å¯ä»¥å为以ä¸å个é¶æ®µï¼
1ãé¢å¤çé¶æ®µå¨è¯¥é¶æ®µä¸»è¦å®æ对æºä»£ç çé¢å¤çå·¥ä½ï¼ä¸»è¦å æ¬å¯¹å®å®ä¹æ令ï¼å¤´æ件å å«æ令ï¼é¢å®ä¹æ令åç¹æ®å符çå¤çï¼å¦å¯¹å®å®ä¹çæ¿æ¢ä»¥åæ件头ä¸æå å«çæ件ä¸é¢å®ä¹ä»£ç çæ¿æ¢çï¼æ»ä¹è¿æ¥ä¸»è¦å®æä¸äºæ¿æ¢å·¥ä½ï¼è¾åºæ¯åæºæ件å«ä¹ç¸åä½å 容ä¸åçæ件ã
2ãç¼è¯ãä¼åé¶æ®µç¼è¯å°±æ¯å°ç¬¬ä¸é¶æ®µå¤çå¾å°çæ件éè¿è¯æ³è¯æ³åæç转æ¢ä¸ºæ±ç¼è¯è¨ãä¼åå æ¬å¯¹ä¸é´ä»£ç çä¼åï¼å¦å é¤å ¬å ±è¡¨è¾¾å¼ï¼å¾ªç¯ä¼åçï¼å对ç®æ 代ç ççæè¿è¡çä¼åï¼å¦å¦ä½å åå©ç¨æºå¨çå¯åå¨åæ¾æå ³åéçå¼ï¼ä»¥åå°å å访é®æ¬¡æ°ã
3ãæ±ç¼é¶æ®µå°æ±ç¼è¯è¨ç¿»è¯ææºå¨æ令ã
4ãé¾æ¥é¶æ®µé¾æ¥é¶æ®µç主è¦å·¥ä½æ¯å°æå ³çç®æ æ件è¿æ¥èµ·æ¥ï¼å³å°å¨ä¸ä¸ªæ件ä¸å¼ç¨ç符å·å该符å·å¨å¦å¤ä¸ä¸ªæ件ä¸çå®ä¹è¿æ¥èµ·æ¥ï¼ä½¿å¾ææçç®æ æ件æ为ä¸ä¸ªè½å¤è¢«æä½ç³»ç»è£ å ¥æ§è¡çç»ä¸æ´ä½ã
åèèµææ¥æºï¼ç¾åº¦ç¾ç§-gccï¼GNUç¼è¯å¨å¥ä»¶ï¼
åèèµææ¥æºï¼ç¾åº¦ç¾ç§-MicrosoftC
åèèµææ¥æºï¼ç¾åº¦ç¾ç§-TurboC
ROS中MPC局部路径规划器使用方法及源码流程解读
本文将详细介绍ROS导航框架中MPC局部路径规划器mpc_local_planner的使用方法,并对其源码进行解读,梳理其规划流程。内容分为MPC模型预测控制算法简介、mpc_local_planner使用方法、mpc_local_planner源码解读与规划流程梳理三个部分。
一、MPC模型预测控制算法简介
MPC的设计和实施包含三个步骤。首先在k时刻,需要估计/测量出系统当前状态。MPC的优点在于处理多变量、多约束系统,适应动态环境,并提供优化性能。但它的计算复杂度较高,适用于需要高精度控制的应用。
二、mpc_local_planner使用方法
在ROS现有开源MPC模型预测控制算法的局部路径规划器插件中,mpc_local_planner功能包广受欢迎。它与teb_local_planner出自同一研究机构,因此在流程及上有许多相似之处。以下是mpc_local_planner的使用步骤:
1. 下载mpc_local_planner功能包并将其放置在ROS工作空间的src文件夹下。
2. 配置环境,执行以下指令安装所需依赖和环境。
3. 使用catkin_make对mpc_local_planner功能包进行编译。
4. 可根据需要执行以下语句中的一个或多个,来使用功能包自带的示例,对功能包是否能够正常工作,并可对其性能进行测试。
5. 在启动move_base的launch文件中,配置局部路径规划器插件为mpc_local_planner/MpcLocalPlannerROS,并根据机器人的实际情况,设定参数clearing_rotation_allowed的值来设定在规划时是否允许机器人旋转。
6. 在上述move_base节点配置中调用mpc_local_planner的参数配置文件mpc_local_planner_params.yaml。
7. 进行效果测试,并根据测试效果对参数进行调节。
我们开源了一个人人可以快速部署的开源 AI 工具导航站
我们团队近期推出了一项创新之举,打造了Tap4 AI 工具导航站,旨在为用户提供一个便捷的AI工具资源库。导航站内囊括了主流以及新兴的AI工具,旨在帮助用户轻松发现心仪的应用。同时,我们还为AI工具开发者提供了推广平台,包括收录到导航站与SEO营销服务。
为了让更多非技术背景的用户也能拥有属于自己的导航站,我们对前端进行了调整,支持一站式的开发环境,并允许手动录入网站内容。这样一来,大家无需专业知识,也能轻松搭建起AI导航站。您只需访问我们的开源地址:tap4-ai-webui,就能获取源码。
导航站的技术栈包括了我们所使用的特性,确保了高效稳定的服务。在维护AI工具信息方面,我们提供了一种简便的方式,用户可通过手动添加信息并使用AI生成的markdown格式,快速收录至网站列表。我们的目标是降低AI导航站的搭建门槛,让每个人都能拥有自己的导航站。
未来,我们计划持续更新导航站内容,提供更多实用信息。我们诚邀大家参与项目,通过fork方式搭建自己的AI导航站。如果您觉得我们的服务实用,欢迎给我们star,或在issue下提出更多建议。同时,我们也欢迎AI产品免费提交至我们的Tap4 AI Tools Directory,以及将AI导航站收录到我们的AI Startup列表。
