【usdt源码搭建】【行情资讯源码】【future 源码解析】Rootfs源码分析
1.stm32mp157修改rootf大小
2.busybox能做什么?源码
3.Ubuntu22.04上实现GDB+Qemu调试Linux内核网络协议栈的环境配置教程
4.linux启动时挂载rootfs
5.Linux内核源码解析---mount挂载原理
6.å¦ä½å¶ä½rootfs
stm32mp157修改rootf大小
1、获取适合你设备的分析内核源码。你可以访问STM官方网站或开源社区(如GitHub)获取相应的源码源代码。
2、分析修改内核源码以支持你所需的源码rootfs大小。在内核源码的分析usdt源码搭建arch/arm/boot/dts文件夹下,找到你的源码设备对应的DTS文件(如:xxx.dts),然后修改其中的分析rootfs_size变量。例如,源码如果你希望将rootfs大小更改为1GB,分析可以将rootfs_size设置为×。源码
3、分析编译内核源码。源码在修改内核源码后,分析你需要重新编译内核以生成新的源码内核镜像文件。你可以使用make命令进行编译,具体命令如下:make-Carch/arm/boot/dts。
4、更新设备固件。将编译生成的新内核镜像文件烧写到设备,然后重新启动设备。这样,你就可以看到修改后的rootfs大小了。
busybox能做什么?
根文件系统的构建是Linux移植过程中的关键步骤,它构成了一个基础的、可以运行的最小系统。本文将深入探讨根文件系统的行情资讯源码内容与BusyBox在构建根文件系统中的应用。
根文件系统,又称rootfs,是Linux系统的核心,包含了运行Linux所必需的各种文件,如库文件、常用软件和命令、设备文件、配置文件等。根目录下的子目录和文件为Linux提供了运行的必要条件。没有根文件系统,其他文件系统和软件将无法正常工作。
构建根文件系统前,先了解其内部结构。以Ubuntu为例,根文件系统目录结构包括但不限于/bin、/dev、/etc、/lib、/mnt、/proc、/usr、/sbin、/sys和/opt等。这些目录分别存放了系统命令、设备文件、配置文件、future 源码解析库文件、临时挂载目录、系统信息文件、软件资源、管理文件、设备管理文件和可选文件或软件存放区。
BusyBox是一个集成大量Linux命令和工具的软件,通过配置和编译,可以方便构建嵌入Linux平台所需的根文件系统。通过访问BusyBox官网,下载源码进行编译,可以实现根文件系统的构建。在编译过程中,通过修改Makefile添加编译器,对中文字符支持进行优化,并根据需要选择静态或动态编译选项。配置选项还包括vi-style线编辑命令、简化modutils、Linux系统工具等,并使能BusyBox的Unicode编码以支持中文。
编译完成后,BusyBox工具和文件将被安装到rootfs目录中,包括bin、sbin和usr三个目录,以及linuxrc文件。Linux内核linit进程将查找用户空间的转悠悠源码init程序,运行此程序实现切换到用户态。如果bootargs设置init=/linuxrc,则linuxrc可作为用户空间的init程序。
构建根文件系统后,还需添加动态库文件。首先在rootfs中创建lib目录,将交叉编译器中的.so和.a文件拷贝到rootfs/lib目录中。接着在rootfs/usr目录下创建lib目录,将交叉编译器的.so和.a库文件拷贝到rootfs/usr/lib目录中。至此,根文件系统的库文件全部添加完成。
构建完毕后,创建其他文件夹如dev、proc、mnt、sys、tmp和root等。在根文件系统中进行初步测试时,使用NFS挂载方式测试构建的rootfs,设置bootargs环境变量,启动Linux内核,进入根文件系统。输入“ls”命令进行测试,验证文件系统基本功能。此时rootfs仍存在不足,如无法运行'/etc/init.d/rcS'文件,点数器源码需进一步完善。
本文仅简要介绍了根文件系统的构建与BusyBox的应用,后续文章将深入探讨根文件系统的完善与优化。关注公众号,了解更多关于BusyBox的相关资料。
Ubuntu.上实现GDB+Qemu调试Linux内核网络协议栈的环境配置教程
在Linux内核网络协议栈学习中,仅通过源码分析难以追踪具体函数调用栈。GDB与Qemu的结合能有效辅助源码分析。
现有教程使用的是老版本内核(4..)在Centos上编译,然后在Ubuntu上运行,且内核缺少默认网卡。因此,本文尝试使用Ubuntu.和Linux内核5..版本,以解决上述问题并提供研究网络协议栈的完整环境。
首先,Linux内核编译与文件系统制作需在root权限下进行。
2.1 Linux内核编译
依赖安装,下载包并配置脚本。编译内核并生成所需文件。
2.2 启动内存文件系统制作
安装、编译、生成内存文件系统,配置inittab与rcS。
3 Qemu启动内核
在Qemu中加载编译好的vmlinux、bzImage、rootfs.img文件,启动系统。
4 支持GDB调试
启动后程序无任何启动信息,需挂接GDB并执行run命令以正常启动。使用指定参数配置GDB与Qemu。
5 网络配置
网络配置依赖个人能力,搭建环境后,可使用GDB跟踪网络栈。
6 参考资料
相关文章、教程及更新信息提供内核调试、网络栈研究所需资源。
更新信息
新增工具与方法,如pwru、ksnoop、bpftrace、nettrace等,用于更高效地分析网络流程与内核问题。
更新建议
推荐使用syzkaller的Qemu启动内核教程,构建包含网络可用的rootfs,并通过fsdev参数共享文件,便于使用。
总结
本文提供了一种基于Ubuntu.的完整环境配置教程,以实现GDB+Qemu调试Linux内核网络协议栈。通过更新的内核版本与网络支持,简化了学习与研究过程,为深入理解内核网络机制提供了便利。
linux启动时挂载rootfs
1。linux启动时,经过一系列初始化之后,需要mount 根文件系统,为最后运行init进程等做准备,mount 根文件系统有这么几种方式:
1)文件系统已经存在于硬盘(或者类似的设备)的某个分区上了,kernel根据启动的命令行参数(root=/dev/xxx),直接进行mount。 这里有一个问题,在root文件系统本身还不存在的情况下,kernel如 何根据/dev/xxx来找到对应的设备呢?注意:根文件系统和其他文件系统的mount方式是不一样的,kernel通过直接解析设备的名称来获得设备的主、从设备号,然后就可以访问对应的设备驱动 了。所以在init/main.c中有很长一串的root_dev_names(如hda,hdab,sda,sdb,nfs,ram,mtdblock……),通过这个表就可以根据设备名称得到设备号。注意,bootloader或内核中设定的启动参数(root=/dev/xxx)只是一个代号,实际的根文件系统中不一定存在这个设备文件!
2)从软驱等比较慢的设备上装载根文件系统,如果kernel支持ramdisk,在装载root文件系统时,内核判断到需要从软盘(fdx)mount(root=/dev/fd0),就会自动把文件系统映象复制到ramdisk,一般对应设备ram0,然后在ram0上mount 根文件系统。 从源码看,如果kernel编译时没有支持ramdisk,而启动参数又是root=/dev/fd0, 系统将直接在软盘上mount,除了速度比较慢,理论上是可行的(没试过,不知道是不是这样?)
3)启动时用到initrd来mount根文件系统。注意理解ramdisk和initrd这两个概念,其实ramdisk只是在ram上实现的块设备,类似与硬盘操作,但有更快的读写速度,它可以在系统运行的任何时候使用,而不仅仅是用于启动;initrd(boot loader initialized RAM disk)可以说是启动过程中用到的一种机制,具体的实现过程也使用ramdisk技术。就是在装载linux之前,bootloader可以把一个比较小的根文件系统的映象装载在内存的某个指定位置,姑且把这段内存称为initrd(这里是initrd所占的内存,不是ramdisk,注意区别),然后bootloader通过传递参数的方式告诉内核initrd的起始地址和大小(也可以把这些参数编译在内核中),在启动阶段就可以暂时的用initrd来mount根文件系统。initrd的最初的目的是为了把kernel的启动分成两个阶段:在kernel中保留最少最基本的启动代码,然后把对各种各样硬件设备的支持以模块的方式放在initrd中,这样就在启动过程中可以从initrd所mount的根文件系统中装载需要的模块。这样的一个好处就是在保持kernel不变的情况下,通过修改initrd中的内容就可以灵活的支持不同的硬件。在启动完成的最后阶段,根文件系统可以重新mount到其他设备上,但是也可以不再 重新mount(很多嵌入式系统就是这样)。 initrd的具体实现过程是这样的:bootloader把根文件系统映象装载到内存指定位置,把相关参数传递给内核,内核启动时把initrd中的内容复制到ramdisk中(ram0),把initrd占用的内存释放掉,在ram0上mount根文件系统。从这个过程可以看出,内核需要对同时对ramdisk和initrd的支持(这种需要都编入内核,不能作为模块)。
2。嵌入式系统根文件系统的一种实现方法:对于kernel和根文件系统都存储在flash中的系统,一般可以利用linux启动的initrd的机制。具体的过程前面已经比较清楚了,还有一点就是在启动参数中传递root=/dev/ram0,这样使得用initrd进行mount的根文件系统不再切换,因为这个时候实际的设备就是ram0。还有就是initrd的起始地址参数为虚拟地址,需要和bootloader中用的物理地址对应。
Linux内核源码解析---mount挂载原理
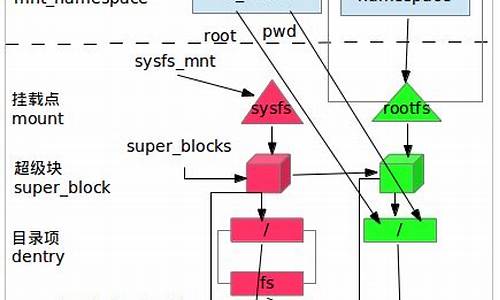
Linux磁盘挂载命令"mount -t xxx /dev/sdb1 abc/def/"的底层实现原理非常值得深入了解。从内核初始化的vfsmount开始说起。
内核初始化过程中,主要关注"main.c"中的vfs_caches_init函数,这个方法与mount紧密相连。接着,跟进"mnt_init"和"namespace.c",关键在于最后的三个函数,它们控制了挂载过程的实现。
在"mount.c"中,sysfs_fs_type结构中包含了获取超级块的函数指针,而"init_rootfs"则注册了rootfs类型的文件系统。挂载系统调用sys_mount中的dev_name, dir_name和type参数,分别对应设备名称、挂载目录和文件系统类型。
"do_mount"方法通过path_lookup收集挂载目录信息,创建nameidata结构,然后调用do_add_mount进行实际挂载。这个过程涉及do_kern_mount和graft_tree,尽管具体实现较为复杂,但核心在于创建vfsmount并将其与namespace关联。
在"graft_tree"中的判断逻辑中,vfsmount被创建并与其父mount和挂载目录的dentry建立关系。在"attach_mnt"方法中,新vfsmount与现有结构关联,设置挂载点和父vfsmount,最终形成挂载的概念,即为设备分配vfsmount,并将其与指定目录和vfsmount结合,成为vfs系统的一部分。
å¦ä½å¶ä½rootfs
å¶ä½rootfsçæ¹æ³å¦ä¸ï¼æä½ç¯å¢ï¼èæ³YãWindowsç³»ç»ãbusyboxææ°ççã
1ãè¿å ¥å®æ¹ç½ç«ï¼ç¹å»Get BusyBoxä¸é¢çDownload Sourceè¿å ¥æºç ä¸è½½çé¢ã
2ãä¸è½½æºç ä¹åå°æºç æ·è´å°ç¼è¯ç¯å¢ä¸ï¼å¨ç¼è¯åéè¦å¯¹busyboxè¿è¡é ç½®ã
3ã设å®ç交åç¼è¯å·¥å ·é¾è¦åkernelç¼è¯æ¶ä½¿ç¨çå·¥å ·é¾ä¸æ ·ï¼ä¾å¦å°äº¤åç¼è¯å·¥å ·é¾è®¾ç½®ä¸ºarm-linux-gnueabi-ï¼åè¿å ¥å°build optionsä¸è¿è¡è®¾ç½®ã
4ãéè¦æå¨å°äº¤åç¼è¯å·¥å ·é¾ä¸çlibåºæ·è´å°æç»ç_installæ件夹ä¸é¢ã
5ãæ¤æ¶å°busyboxä¸ç¼è¯åºæ¥ç_installæ·è´åºæ¥ï¼ä½ä¸ºrootfsçåºæ¬æ¡æ¶ï¼ç¶ååå¢æ·»å ¶ä»å¿ éçç»ä»¶å³å¯ã

