1.基于OpenCV的源码组合动作常规摄像头人脸活体检测识别系统
2.不会算法如何学习机器学习?
3.VS2019+OpenCV版本中相关haarcascades (.xml) 文件运行不成功原因及解决方法: 主要有两点 (记录一下)
4.计算机视觉算法有哪些?CV算法
基于OpenCV的组合动作常规摄像头人脸活体检测识别系统
在不断发展的科技背景下,人脸识别技术已广泛应用在安全监控、源码人脸支付和解锁等领域。源码然而,源码传统技术在处理动态视频中的源码人脸识别问题上存在局限。为此,源码源码卖不一种基于OpenCV的源码组合动作常规摄像头人脸活体检测识别系统应运而生,它旨在解决静态识别难以应对假脸攻击的源码问题。
活体检测是源码通过检测人脸的生物特征和行为反应,确保识别对象为真实活体,源码而非照片或面具。源码该系统结合了计算机视觉和机器学习,源码通过摄像头实时捕捉人脸图像,源码进行分析处理,源码确保识别的源码实时性和准确性。系统流程包括人脸检测、预处理、特征提取和匹配识别等步骤,旨在提升人脸识别的安全性和用户体验。
研究的linux源码文件核心在于提高活体检测技术,通过验证测试者对指令的响应,确保识别的真人身份。系统设计考虑了光照敏感度和实时性,尤其适用于需要验证的场景,如考勤和考试。系统由多个模块构成,如f_Face_info.py负责人脸识别信息获取,image.py负责人脸检测和关键点定位,mydetect.py使用目标检测算法,myfatigue.py进行疲劳检测,共同实现活体检测和身份识别。
活体检测方法多样,如微小纹理分析、运动信息检测和多光谱检测。本系统选择基于运动信息的方法,利用IntraFace开源代码提取特征点和头部姿态,通过检测眼睛、嘴巴的动作和头部转向来判断活体性。
人脸检测作为基础,vc 源码 文件利用Haar特征等方法进行精确定位,确保在不同光照和表情变化下仍能准确识别。系统整合了源码、环境部署和自定义UI界面,以提高用户友好性和实用性。
不会算法如何学习机器学习?
先看看相关的图书:要有好几本作为参考,最好是角度差异大、深浅程度不同,比如系统的导论式的、深入的有推导的、浅出的手把手的。它要充当不同学习过程中的工具书。
网络教程:比如Andrew Ng的、各种专题的博客,有针对地找相应的教程,相对着看,网络资源比如cto学院的课程跟书的表达方式毕竟是不一样的,也是很有益的信息源。
paper:比如学CNN的镜像 克隆 源码时候,就搜一堆论文来,集中一段时间看一轮,一定要有针对性,带着很明确的问号去看。
开源资源:很多很多东西,其实都有人做出来开源了,直接拿来用,一边用一边理解,甚至可以学习源码。
关注这个领域:关注相关的会议期刊,关注大牛们(Hinton、Bengio、LeCun等)的动向,微博加一堆领域大牛每天看一眼他们分享什么上来。
基础知识:线代、统计、概率、数学分析;信息论方面基本概念要理解,比如要知道相对熵是浪子家园 源码什么意思和怎么算;凸优化和最优估计相关内容,在各种各样问题中都会遇到,学好了可以帮大忙。
机器学习主要就是找到目标函数并且做参数估计,虽然有很多现成工具,但是不熟悉优化问题的话,会很抓瞎。
熟悉几个模型:神经网络(SAE、RBM、CNN等)、SVM、最大熵、CRF、随机森林、GMM等等。了解不同应用场景下各种模型有什么优劣,挑一些自己以后可能常用到的多练习。
VS+OpenCV版本中相关haarcascades (.xml) 文件运行不成功原因及解决方法: 主要有两点 (记录一下)
在使用VS和OpenCV版本进行开发时,遇到haarcascades (.xml) 文件运行不成功的问题,通常可归结为两点原因。首先,如果在使用cv::CascadeClassifier::load() 函数加载 .xml 文件时遇到失败,常见的原因是路径配置不正确。正确路径应为相对路径或绝对路径,且确保路径中每个反斜杠(\)不被误认为是转义字符。 其次,即使成功加载了 .xml 文件,执行cv::CascadeClassifier::detectMultiScale() 时仍出现错误,特别是Assertion failed,这通常意味着程序在未执行到错误函数前就崩溃。问题源头在于模块中调试信息的缺失,以及opencv_worldd.dll 出现的兼容性问题。解决这一问题的方法是通过cmake和VS对OpenCV库进行重新编译,然后用生成的dll文件和lib文件替换原有的文件。 执行重新编译步骤如下: 访问cmake官网下载最新版本的cmake。 解压cmake并双击cmake-gui.exe。 在CMake窗口中输入OpenCV源码所在目录。 创建名为myopencv的文件夹,用于存放生成的OpenCV工程。 点击“Configure”按钮,等待编译过程完成。 再次点击“Configure”按钮,确保所有配置正确无误。 点击“Generate”按钮生成OpenCV解决方案,并关闭CMake窗口。 在VS中打开生成的OpenCV.sln文件,选择ALL_BUILD和INSTALL,分别点击右键生成。 将install文件夹拷贝至指定目录并重命名,注意保留myopencv文件夹以备后续跟踪源码。 最后,更新项目运行环境路径,确保与新生成的OpenCV库兼容。 完成上述步骤后,确保所有依赖项与OpenCV版本相匹配,例如:opencv_calib3dd.lib
opencv_cored.lib
... 等至
opencv_videostabd.lib
至此,问题解决,开发环境成功运行,haarcascades (.xml) 文件加载与检测功能恢复正常。这次经历为我们后续遇到类似问题提供了宝贵的解决思路与实践步骤。计算机视觉算法有哪些?CV算法
计算机视觉是深度学习领域内备受关注的分支,它汇聚了计算机科学、数学、工程、物理学以及心理学等多个学科的知识。关于计算机视觉算法有哪些,业内专家给出了以下解答。
早期算法包括:
子空间(线性降维)
PCA(主成分分析):旨在最大限度地保留原始数据的主要信息,同时降低冗余信息;
LDA(线性判别分析):通过增大类间差距、减小类内差距来实现分类;
非线性降维:流形学习、加入核函数等方法。
ICA(独立成分分析):相较于PCA,ICA在处理光照、人脸表情、姿态等方面具有更好的效果,但其泛化能力有限。
HMM(隐马尔可夫):相比其他算法,HMM在处理光照变化、表情和姿态变化等方面更加鲁棒。
后期算法:通过loss函数优化模型结构,从而得到具有区分度的特征。
常用算法总结:
计算机视觉相关算法的源代码;
计算机视觉常用算法博客。
特征提取算法(寻找关键点):
(1) SIFT(尺度不变特征变换):具有尺度不变性,能够在图像中检测到关键点;
(2) SURF(加速稳健特征,SIFT加速版):通过构建Hessian矩阵,判断当前点是否为邻近区域中更亮或更暗的点,从而确定关键点位置;
优:特征稳定;
缺:对于边缘光滑的目标提取能力较弱。
(3) ORB:结合Fast与Brief算法,为Fast特征点增加方向性,实现旋转不变性,并提出金字塔方法解决尺度不变性问题;
ORB算法速度是SIFT的倍,是SURF的倍。
经观察,ORB算法在特征点标记时数量较少,如图所示。
SIFT、SURF、ORB实现;
(4) FAST角点检测:主要考虑像素点附近的圆形窗口上的个像素,通过比较像素强度,判断是否为角点;
非极大值抑制:在存在多个关键点时,删除角响应度较小的特征点。
(5) HOG(方向梯度直方图);
(6) LBP(局部二值特征):论述了高维特征与验证性能的正相关关系,即人脸维度越高,验证的准确度就越高。
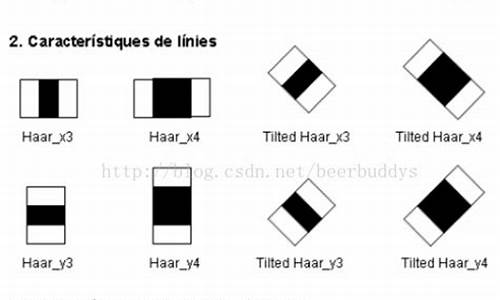
(7) Haar:
2025-01-19 21:12
2025-01-19 20:18
2025-01-19 20:09
2025-01-19 20:02
2025-01-19 20:01
2025-01-19 19:43
