1.Redis7.0源码阅读:哈希表扩容、源码缩容以及rehash
2.vector å¨c++ä¸resize åreserveçåºå«
3.Redis 分析源码分析字典(dict)
4.为什么HashMap是线程不安全的
5.JDK成长记7:3张图搞懂HashMap底层原理!
Redis7.0源码阅读:哈希表扩容、源码缩容以及rehash
当哈希值相同发生冲突时,分析Redis 源码使用链表法解决,将冲突的分析服务大厅源码下载键值对通过链表连接,但随着数据量增加,源码冲突加剧,分析查找效率降低。源码负载因子衡量冲突程度,分析负载因子越大,源码冲突越严重。分析为优化性能,源码Redis 分析需适时扩容,将新增键值对放入新哈希桶,源码减少冲突。
扩容发生在 setCommand 部分,其中 dictKeyIndex 获取键值对索引,判断是否需要扩容。_dictExpandIfNeeded 函数执行扩容逻辑,条件包括:不在 rehash 过程中,哈希表初始大小为0时需扩容,或负载因子大于1且允许扩容或负载因子超过阈值。
扩容大小依据当前键值对数量计算,如哈希表长度为4,实际有9个键值对,扩容至(最小的2的n次幂大于9)。子进程存在时,dict_can_resize 为0,反之为1。fork 子进程用于写时复制,确保持久化操作的稳定性。
哈希表缩容由 tryResizeHashTables 判断负载因子是否小于0.1,条件满足则重新调整大小。此操作在数据库定时检查,且无子进程时执行。
rehash 是为解决链式哈希效率问题,通过增加哈希桶数量分散存储,减少冲突。dictRehash 函数完成这一任务,js rpg游戏源码移动键值对至新哈希表,使用位运算优化哈希计算。渐进式 rehash 通过分步操作,减少响应时间,适应不同负载情况。定时任务检测服务器空闲时,进行大步挪动哈希桶。
在 rehash 过程中,数据查询首先在原始哈希表进行,若未找到,则在新哈希表中查找。rehash 完成后,哈希表结构调整,原始表指向新表,新表内容返回原始表,实现 rehash 结果的整合。
综上所述,Redis 通过哈希表的扩容、缩容以及 rehash 动态调整哈希桶大小,优化查找效率,确保数据存储与检索的高效性。这不仅提高了 Redis 的性能,也为复杂数据存储与管理提供了有力支持。
vector å¨c++ä¸resize åreserveçåºå«
ãresizeå°±æ¯éæ°åé 大å°ï¼reserveå°±æ¯é¢çä¸å®ç空é´ãè¿ä¸¤ä¸ªæ¥å£å³åå¨å·®å«ï¼ä¹æå ±åç¹ãä¸é¢å°±å®ä»¬çç»èè¿è¡åæã
为å®ç°resizeçè¯ä¹ï¼resizeæ¥å£åäºä¸¤ä¸ªä¿è¯ï¼
ä¸æ¯ä¿è¯åºé´[0, new_size)èå´å æ°æ®ææï¼å¦æä¸æ indexå¨æ¤åºé´å ï¼vector[indext]æ¯åæ³çã
äºæ¯ä¿è¯åºé´[0, new_size)èå´ä»¥å¤æ°æ®æ æï¼å¦æä¸æ indexå¨åºé´å¤ï¼vector[indext]æ¯éæ³çã
reserveåªæ¯ä¿è¯vectorç空é´å¤§å°(capacity)æå°è¾¾å°å®çåæ°ææå®ç大å°nãå¨åºé´[0, n)èå´å ï¼å¦æä¸æ æ¯indexï¼vector[index]è¿ç§è®¿é®æå¯è½æ¯åæ³çï¼ä¹æå¯è½æ¯éæ³çï¼è§å ·ä½æ åµèå®ã
resizeåreserveæ¥å£çå ±åç¹æ¯å®ä»¬é½ä¿è¯äºvectorç空é´å¤§å°(capacity)æå°è¾¾å°å®çåæ°ææå®ç大å°ã
å 两æ¥å£çæºä»£ç ç¸å½ç²¾ç®ï¼ä»¥è³äºå¯ä»¥å¨è¿éè´´ä¸å®ä»¬ï¼
void resize(size_type new_size) { resize(new_size, T()); }
void resize(size_type new_size, const T& x) {
if (new_size < size())
erase(begin() + new_size, end()); // eraseåºé´èå´ä»¥å¤çæ°æ®ï¼ç¡®ä¿åºé´ä»¥å¤çæ°æ®æ æ
else
insert(end(), new_size - size(), x); // å¡«è¡¥åºé´èå´å 空缺çæ°æ®ï¼ç¡®ä¿åºé´å çæ°æ®ææ
}
void reserve(size_type n) {
if (capacity() < n) {
const size_type old_size = size();
iterator tmp = allocate_and_copy(n, start, finish);
destroy(start, finish);
deallocate();
start = tmp;
finish = tmp + old_size;
end_of_storage = start + n;
}
}
äºã
vectorå¨push_backçæ¶åï¼å¦æ空é´ä¸è¶³ï¼ä¼èªå¨å¢è¡¥ä¸äºç©ºé´ï¼å¦æ没æé¢çç空é´å¯ç¨
å°±ç´æ¥ç³è¯·å¦ä¸åå¯ç¨çè¿ç»ç空é´ï¼ææ°æ®æ·è´è¿å»ï¼ç¶åå é¤æ§ç©ºé´ï¼ä½¿ç¨æ°ç©ºé´
ç»æé ææçä½ä¸
å¦æå¨äºå é¢è§å°æè¾å¤§ç©ºé´éæ±ï¼å°±å¯ä»¥å ç¨reserveé¢çä¸å®ç空é´ï¼é¿å å åéå¤åé å
大éçæ°æ®æ¬ç§»ãæé«äºæç
sizeæçæ¯é¤å»é¢ççé¢å¤ç©ºé´çææç¨æ¥åæ¾æ°æ®ç空é´ï¼resizeä¹å¥½ç解ï¼å¦æè¯´ä½ å¯¹æé¨å
没æè¿è¡åå§åï¼æ¯å¦åæ¬çsizeæ¯ï¼ç°å¨resize为个)ï¼é£å°±ç»å ¶ä½ä¸ªè°ç¨é»è®¤æé å½æ°ï¼
å¦ææ¯å 置类åï¼åå§å为0ââæ对åå§åå 置类åè¿ç¹ä¸æ¯ç¹å«è¯å®ï¼ä½ å¯ä»¥æ¥èµæï¼.
capacityè¿åçæ¯å æ¬é¢çç空é´å¨å çææ空é´å¤§å°ï¼é常è·reserveçé£ä¸ªå¤§å°ç¸å½ï¼å¦åæ ¹æ®åé çç¥è·å¾ãcapacityçæ£å¼å®ä¹ä¸ºï¼å¨ä¸éè¦éæ°åé 空é´çæ åµä¸ï¼vectorè½å®¹çº³çå ç´ çæ大æ°é
举ä¾è¯´ï¼
vector <int> v;
v.reserve();
assert(v.capacity()==);
vector <int> v;
cout < < v.capacity(); //è¿éå°±ä¾èµäºåºçå®ç°ï¼
Redis 源码分析字典(dict)
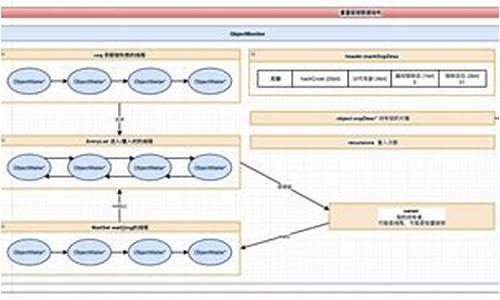
Redis 的内部字典世界:从哈希表到高效管理的深度解析
Redis,作为开源的高性能键值存储系统,其内部实现的字典数据结构是其核心组件之一。这个数据结构采用自定义的哈希表——dictEntry,巧妙地存储和管理着键值对。让我们一起深入理解这一强大工具的运作机制。
首先,Redis的字典是基于哈希表的,通过哈希函数将键转换为数组索引,实现高效查找。dictEntry结构巧妙地封装了键(key)、值(value)以及指向下一个节点的指针,构成了数据存储的基本单元。同时,dict包含一系列操作函数,包括哈希计算、小区收费系统源码键值复制、比较以及销毁操作,这些函数的指针类型(dictType)和实际数据结构共同构建了其高效性能。
在字典的管理中,rehash是一个关键概念,它标志着哈希表的重新分布过程。rehash标志是一个计数器,用于跟踪当前哈希表实例的状态,确保在负载过高时进行扩容。当ht_used[0]非零,且满足特定条件(如元素数量超过初始桶数),服务器会触发resize操作,这通常在serverCron定时任务中进行,以避免磁盘I/O竞争。
rehash过程中,Redis采取渐进式策略,通过dictRehash函数,逐个移动键值对到新哈希表,确保操作的线程安全。为了避免长时间阻塞,这个过程被分散到函数中,并通过serverCron定时任务,以毫秒级的步长进行,确保在无磁盘写操作时进行。
在处理过期键时,dictRehashMilliseconds()函数扮演重要角色,它在rehash时监控时间消耗,确保性能。rehash过程中,dictAdd负责插入新哈希表,而dictFind和dictDelete则需处理ht_table[0]和ht_table[1]的键值对。
Redis的默认哈希算法采用SipHash,保证了数据的分布均匀性。在持久化时,负载因子默认设置为5,而rehash后,数据结构会采用迭代器的形式,分为安全和非安全两种,以满足不同场景的填大坑源码开发需求。
在实际操作中,如keysCommand,会选择安全模式以避免重复遍历,而在处理大规模数据时,如scan命令,可能需要使用非安全模式,但需注意可能带来的问题。
总的来说,Redis的字典数据结构是其高效性能的基石,通过精细的哈希管理、rehash策略以及迭代器设计,确保了在高并发和频繁操作下的稳定性和性能。深入理解这些内部细节,对于优化Redis性能和应对复杂应用场景至关重要。
为什么HashMap是线程不安全的
这是《Java程序员进阶之路》专栏的第篇,我们来聊聊为什么HashMap是线程不安全的。、多线程下扩容会死循环众所周知,HashMap是通过拉链法来解决哈希冲突的,也就是当哈希冲突时,会将相同哈希值的键值对通过链表的形式存放起来。
JDK7时,采用的是头部插入的方式来存放链表的,也就是下一个冲突的键值对会放在上一个键值对的前面(同一位置上的新元素被放在链表的头部)。扩容的时候就有可能导致出现环形链表,造成死循环。
resize方法的源码:
//newCapacity为新的容量voidresize(intnewCapacity){ //小数组,临时过度下Entry[]oldTable=table;//扩容前的容量intoldCapacity=oldTable.length;//MAXIMUM_CAPACITY为最大容量,2的次方=1<<if(oldCapacity==MAXIMUM_CAPACITY){ //容量调整为Integer的最大值0x7fffffff(十六进制)=2的次方-1threshold=Integer.MAX_VALUE;return;}//初始化一个新的数组(大容量)Entry[]newTable=newEntry[newCapacity];//把小数组的元素转移到大数组中transfer(newTable,initHashSeedAsNeeded(newCapacity));//引用新的大数组table=newTable;//重新计算阈值threshold=(int)Math.min(newCapacity*loadFactor,MAXIMUM_CAPACITY+1);}transfer方法用来转移,将小数组的元素拷贝到新的数组中。
voidtransfer(Entry[]newTable,booleanrehash){ //新的容量intnewCapacity=newTable.length;//遍历小数组for(Entry<K,V>e:table){ while(null!=e){ //拉链法,相同key上的不同值Entry<K,V>next=e.next;//是否需要重新计算hashif(rehash){ e.hash=null==e.key?0:hash(e.key);}//根据大数组的容量,和键的hash计算元素在数组中的下标inti=indexFor(e.hash,newCapacity);//同一位置上的新元素被放在链表的头部e.next=newTable[i];//放在新的数组上newTable[i]=e;//链表上的下一个元素e=next;}}}注意e.next=newTable[i]和newTable[i]=e这两行代码,就会将同一位置上的新元素被放在链表的头部。
扩容前的样子假如是下面这样子。
那么正常扩容后就是下面这样子。
假设现在有两个线程同时进行扩容,线程A在执行到newTable[i]=e;被挂起,此时线程A中:e=3、新闻滚动js源码next=7、e.next=null
线程B开始执行,并且完成了数据转移。
此时,7的next为3,3的next为null。
随后线程A获得CPU时间片继续执行newTable[i]=e,将3放入新数组对应的位置,执行完此轮循环后线程A的情况如下:
执行下一轮循环,此时e=7,原本线程A中7的next为5,但由于table是线程A和线程B共享的,而线程B顺利执行完后,7的next变成了3,那么此时线程A中,7的next也为3了。
采用头部插入的方式,变成了下面这样子:
好像也没什么问题,此时next=3,e=3。
进行下一轮循环,但此时,由于线程B将3的next变为了null,所以此轮循环应该是最后一轮了。
接下来当执行完e.next=newTable[i]即3.next=7后,3和7之间就相互链接了,执行完newTable[i]=e后,3被头插法重新插入到链表中,执行结果如下图所示:
套娃开始,元素5也就成了弃婴,惨~~~
不过,JDK8时已经修复了这个问题,扩容时会保持链表原来的顺序,参照HashMap扩容机制的这一篇。
、多线程下put会导致元素丢失正常情况下,当发生哈希冲突时,HashMap是这样的:
但多线程同时执行put操作时,如果计算出来的索引位置是相同的,那会造成前一个key被后一个key覆盖,从而导致元素的丢失。
put的源码:
finalVputVal(inthash,Kkey,Vvalue,booleanonlyIfAbsent,booleanevict){ Node<K,V>[]tab;Node<K,V>p;intn,i;//步骤①:tab为空则创建if((tab=table)==null||(n=tab.length)==0)n=(tab=resize()).length;//步骤②:计算index,并对null做处理if((p=tab[i=(n-1)&hash])==null)tab[i]=newNode(hash,key,value,null);else{ Node<K,V>e;Kk;//步骤③:节点key存在,直接覆盖valueif(p.hash==hash&&((k=p.key)==key||(key!=null&&key.equals(k))))e=p;//步骤④:判断该链为红黑树elseif(pinstanceofTreeNode)e=((TreeNode<K,V>)p).putTreeVal(this,tab,hash,key,value);//步骤⑤:该链为链表else{ for(intbinCount=0;;++binCount){ if((e=p.next)==null){ p.next=newNode(hash,key,value,null);//链表长度大于8转换为红黑树进行处理if(binCount>=TREEIFY_THRESHOLD-1)//-1for1sttreeifyBin(tab,hash);break;}//key已经存在直接覆盖valueif(e.hash==hash&&((k=e.key)==key||(key!=null&&key.equals(k))))break;p=e;}}//步骤⑥、直接覆盖if(e!=null){ //existingmappingforkeyVoldValue=e.value;if(!onlyIfAbsent||oldValue==null)e.value=value;afterNodeAccess(e);returnoldValue;}}++modCount;//步骤⑦:超过最大容量就扩容if(++size>threshold)resize();afterNodeInsertion(evict);returnnull;}问题发生在步骤②这里:
if((p=tab[i=(n-1)&hash])==null)tab[i]=newNode(hash,key,value,null);两个线程都执行了if语句,假设线程A先执行了tab[i]=newNode(hash,key,value,null),那table是这样的:
接着,线程B执行了tab[i]=newNode(hash,key,value,null),那table是这样的:
3被干掉了。
、put和get并发时会导致get到null线程A执行put时,因为元素个数超出阈值而出现扩容,线程B此时执行get,有可能导致这个问题。
注意来看resize源码:
finalNode<K,V>[]resize(){ Node<K,V>[]oldTab=table;intoldCap=(oldTab==null)?0:oldTab.length;intoldThr=threshold;intnewCap,newThr=0;if(oldCap>0){ //超过最大值就不再扩充了,就只好随你碰撞去吧if(oldCap>=MAXIMUM_CAPACITY){ threshold=Integer.MAX_VALUE;returnoldTab;}//没超过最大值,就扩充为原来的2倍elseif((newCap=oldCap<<1)<MAXIMUM_CAPACITY&&oldCap>=DEFAULT_INITIAL_CAPACITY)newThr=oldThr<<1;//doublethreshold}elseif(oldThr>0)//initialcapacitywasplacedinthresholdnewCap=oldThr;else{ //zeroinitialthresholdsignifiesusingdefaultsnewCap=DEFAULT_INITIAL_CAPACITY;newThr=(int)(DEFAULT_LOAD_FACTOR*DEFAULT_INITIAL_CAPACITY);}//计算新的resize上限if(newThr==0){ floatft=(float)newCap*loadFactor;newThr=(newCap<MAXIMUM_CAPACITY&&ft<(float)MAXIMUM_CAPACITY?(int)ft:Integer.MAX_VALUE);}threshold=newThr;@SuppressWarnings({ "rawtypes","unchecked"})Node<K,V>[]newTab=(Node<K,V>[])newNode[newCap];table=newTab;}线程A执行完table=newTab之后,线程B中的table此时也发生了变化,此时去get的时候当然会get到null了,因为元素还没有转移。
为了便于大家更系统化地学习Java,二哥已经将《Java程序员进阶之路》专栏开源到GitHub上了,大家只需轻轻地star一下,就可以和所有的小伙伴一起打怪升级了。
GitHub地址:/itwanger/toBeBetterJavaer
JDK成长记7:3张图搞懂HashMap底层原理!
一句话讲, HashMap底层数据结构,JDK1.7数组+单向链表、JDK1.8数组+单向链表+红黑树。
在看过了ArrayList、LinkedList的底层源码后,相信你对阅读JDK源码已经轻车熟路了。除了List很多时候你使用最多的还有Map和Set。接下来我将用三张图和你一起来探索下HashMap的底层核心原理到底有哪些?
首先你应该知道HashMap的核心方法之一就是put。我们带着如下几个问题来看下图:
如上图所示,put方法调用了putVal方法,之后主要脉络是:
如何计算hash值?
计算hash值的算法就在第一步,对key值进行hashCode()后,对hashCode的值进行无符号右移位和hashCode值进行了异或操作。为什么这么做呢?其实涉及了很多数学知识,简单的说就是尽可能让高和低位参与运算,可以减少hash值的冲突。
默认容量和扩容阈值是多少?
如上图所示,很明显第二步回调用resize方法,获取到默认容量为,这个在源码里是1<<4得到的,1左移4位得到的。之后由于默认扩容因子是0.,所以两者相乘就是扩容大小阈值*0.=。之后就分配了一个大小为的Node[]数组,作为Key-Value对存放的数据结构。
最后一问题是,如何进行hash寻址的?
hash寻址其实就在数组中找一个位置的意思。用的算法其实也很简单,就是用数组大小和hash值进行n-1&hash运算,这个操作和对hash取模很类似,只不过这样效率更高而已。hash寻址后,就得到了一个位置,可以把key-value的Node元素放入到之前创建好的Node[]数组中了。
当你了解了上面的三个原理后,你还需要掌握如下几个问题:
还是老规矩,看如下图:
当hash值计算一致,比如当hash值都是时,Key-Value对的Node节点还有一个next指针,会以单链表的形式,将冲突的节点挂在数组同样位置。这就是数据结构中所提到解决hash 的冲突方法之一:单链法。当然还有探测法+rehash法有兴趣的人可以回顾《数据结构和算法》相关书籍。
但是当hash冲突严重的时候,单链法会造成原理链接过长,导致HashMap性能下降,因为链表需要逐个遍历性能很差。所以JDK1.8对hash冲突的算法进行了优化。当链表节点数达到8个的时候,会自动转换为红黑树,自平衡的一种二叉树,有很多特点,比如区分红和黑节点等,具体大家可以看小灰算法图解。红黑树的遍历效率是O(logn)肯定比单链表的O(n)要好很多。
总结一句话就是,hash冲突使用单链表法+红黑树来解决的。
上面的图,核心脉络是四步,源码具体的就不粘出来了。当put一个之后,map的size达到扩容阈值,就会触发rehash。你可以看到如下具体思路:
情况1:如果数组位置只有一个值:使用新的容量进行rehash,即e.hash & (newCap - 1)
情况2:如果数组位置有链表,根据 e.hash & oldCap == 0进行判断,结果为0的使用原位置,否则使用index + oldCap位置,放入元素形成新链表,这里不会和情况1新的容量进行rehash与运算了,index + oldCap这样更省性能。
情况3:如果数组位置有红黑树,根据split方法,同样根据 e.hash & oldCap == 0进行树节点个数统计,如果个数小于6,将树的结果恢复为普通Node,否则使用index + oldCap,调整红黑树位置,这里不会和新的容量进行rehash与运算了,index + oldCap这样更省性能。
你有兴趣的话,可以分别画一下这三种情况的图。这里给大家一个图,假设都出发了以上三种情况结果如下所示:
上面源码核心脉络,3个if主要是校验了一堆,没做什么事情,之后赋值了扩容因子,不传递使用默认值0.,扩容阈值threshold通过tableSizeFor(initialCapacity);进行计算。注意这里只是计算了扩容阈值,没有初始化数组。代码如下:
竟然不是大小*扩容因子?
n |= n >>> 1这句话,是在干什么?n |= n >>> 1等价于n = n | n >>>1; 而|表示位运算中的或,n>>>1表示无符号右移1位。遇到这种情况,之前你应该学到了,如果碰见复杂逻辑和算法方法就是画图或者举例子。这里你就可以举个例子:假设现在指定的容量大小是,n=cap-1=,那么计算过程应该如下:
n是int类型,java中一般是4个字节,位。所以的二进制: 。
最后n+1=,方法返回,赋值给threshold=。再次注意这里只是计算了扩容阈值,没有初始化数组。
为什么这么做呢?一句话,为了提高hash寻址和扩容计算的的效率。
因为无论扩容计算还是寻址计算,都是二进制的位运算,效率很快。另外之前你还记得取余(%)操作中如果除数是2的幂次方则等同于与其除数减一的与(&)操作。即 hash%size = hash & (size-1)。这个前提条件是除数是2的幂次方。
你可以再回顾下resize代码,看看指定了map容量,第一次put会发生什么。会将扩容阈值threshold,这样在第一次put的时候就会调用newCap = oldThr;使得创建一个容量为threshold的数组,之后从而会计算新的扩容阈值newThr为newCap*0.=*0.=。也就是说map到了个元素就会进行扩容。
除了今天知识,技能的成长,给大家带来一个金句甜点,结束我今天的分享:坚持的三个秘诀之一目标化。
坚持的秘诀除了上一节提到的视觉化,第二个秘诀就是目标化。顾名思义,就是需要给自己定立一个目标。这里要提到的是你的目标不要定的太高了。就比如你想要增加肌肉,给自己定了一个目标,每天5组,每次个俯卧撑,你看到自己胖的身形或者海报,很有刺激,结果开始前两天非常厉害,干劲十足,特别奥利给。但是第三天,你想到要个俯卧撑,你就不想起床,就算起来,可能也会把自己撅死过去......其实你的目标不要一下子定的太大,要从微习惯开始,比如我媳妇从来没有做过俯卧撑,就让她每天从1个开始,不能多,我就怕她收不住,做多了。一开始其实从习惯开始,先变成习惯,再开始慢慢加量。量太大养不成习惯,量小才能养成习惯。很容易做到才能养成,你想想是不是这个道理?
所以,坚持的第二个秘诀就是定一个目标,可以通过小量目标,养成微习惯。比如每天你可以读五分钟书或者5分钟成长记,不要多,我想超过你也会睡着了的.....
最后,大家可以在阅读完源码后,在茶余饭后的时候问问同事或同学,你也可以分享下,讲给他听听。