1.nginx源码分析--master和worker进程模型
2.DETR3D模型源码导读 & MMDetection3D构建流程
3.自然语言处理大模型BLOOM模型结构源码解析(张量并行版)
4.pytorch源码学习03 nn.Module 提纲挈领
5.AI与PDE(七):AFNO模型的模型源代码解析
6.VGGish源码学习

nginx源码分析--master和worker进程模型
一、Nginx整体架构
正常执行中的源码nginx会有多个进程,其中最基本的笔记是master process(主进程)和worker process(工作进程),还可能包括cache相关进程。模型
二、源码核心进程模型
启动nginx的笔记cyw股票指标源码主进程将充当监控进程,主进程通过fork()产生的模型子进程则充当工作进程。
Nginx也支持单进程模型,源码此时主进程即是笔记工作进程,不包含监控进程。模型
核心进程模型框图如下:
master进程
监控进程作为整个进程组与用户的源码交互接口,负责监护进程,笔记不处理网络事件,模型不负责业务执行,源码仅通过管理worker进程实现重启服务、笔记平滑升级、更换日志文件、配置文件实时生效等功能。
master进程通过sigsuspend()函数调用大部分时间处于挂起状态,直到接收到信号。
master进程通过检查7个标志位来决定ngx_master_process_cycle方法的运行:
sig_atomic_t ngx_reap;
sig_atomic_t ngx_terminate;
sig_atomic_t ngx_quit;
sig_atomic_t ngx_reconfigure;
sig_atomic_t ngx_reopen;
sig_atomic_t ngx_change_binary;
sig_atomic_t ngx_noaccept;
进程中接收到的信号对Nginx框架的意义:
还有一个标志位:ngx_restart,仅在master工作流程中作为标志位使用,与信号无关。
核心代码(ngx_process_cycle.c):
ngx_start_worker_processes函数:
worker进程
worker进程主要负责具体任务逻辑,主要关注与客户端或后端真实服务器之间的数据可读/可写等I/O交互事件,因此工作进程的阻塞点在select()、epoll_wait()等I/O多路复用函数调用处,等待数据可读/写事件。也可能被新收到的进程信号中断。
master进程如何通知worker进程进行某些工作?采用的是信号。
当收到信号时,信号处理函数ngx_signal_handler()会执行。
对于worker进程的工作方法ngx_worker_process_cycle,它主要关注4个全局标志位:
sig_atomic_t ngx_terminate;//强制关闭进程
sig_atomic_t ngx_quit;//优雅地关闭进程(有唯一一段代码会设置它,就是接受到QUIT信号。ngx_quit只有在首次设置为1时,才会将ngx_exiting置为1)
ngx_uint_t ngx_exiting;//退出进程标志位
sig_atomic_t ngx_reopen;//重新打开所有文件
其中ngx_terminate、ngx_quit、ngx_reopen都将由ngx_signal_handler根据接收到的信号来设置。ngx_exiting标志位仅由ngx_worker_cycle方法在退出时作为标志位使用。
核心代码(ngx_process_cycle.c):
DETR3D模型源码导读 & MMDetection3D构建流程
本文主要梳理了学习理解DETR3D模型源码与MMDetection3D构建流程的过程。首先,介绍model dict的配置与模型参数设置,指出在模型部分按照backbone、neck、head顺序定义,太和麻将的源码体现模型结构。
MMDetection3D在模型构建中利用类之间的包含关系递归实例化组件。在构建模型后,借助于registry机制实例化每一个组件,展现其层次性与模块化设计。
在初始化流程中,首先在train.py的build_model开始,通过调用build方法逐级初始化各子结构,直至最底层结构,遵循初始化顺序:Detr3D -> backbone -> neck -> head -> head_transformer -> head_transformer_decoder -> 最终组件。其中,许多类继承自官方提供的框架结构,通过super()调用在父类中实现子结构初始化。
关于DETR3D的组件,backbone、neck、head分别负责特征提取、融合、和目标检测的关键阶段。Detr3DHead继承自mmdet3d的DetrHead类,是模型的头部组件,实现特定检测任务。
DETR3DTransformer位于模型底层,是实现论文创新点的关键部分。其通过传感器转换矩阵预测reference points,并将投影到特征图,结合Bilinear Interpolation抓取固定区域特征,通过object queries refinement改善queries,用于目标预测。这一部分负责查询、特征捕捉与优化。
Decoder是DETR3D的核心,专注于实现object queries refinement。这一过程在论文中被详细探讨,并在代码中得到具体实现。值得注意的是,F.grid_sample()在特征处理过程中扮演着关键角色,展示其在变换与映射任务中的应用。
自然语言处理大模型BLOOM模型结构源码解析(张量并行版)
BLOOM模型结构解析,采用Megatron-DeepSpeed框架进行训练,张量并行采用1D模式。基于BigScience开源代码仓库,本文将详细介绍张量并行版BLOOM的原理和结构。 单机版BLOOM解析见文章。 模型结构实现依赖mpu模块,财神到游戏源码推荐系列文章深入理解mpu工具。 Megatron-DeepSpeed张量并行工具代码mpu详解,覆盖并行环境初始化、Collective通信封装、张量并行层实现、测试以及Embedding层、交叉熵实现与测试。 Embedding层:Transformer Embedding层包含Word、Position、TokenType三类,分别将输入映射为稠密向量、注入位置信息、类别信息。通常,位置信息通过ALiBi注入,无需传统Position Embedding,TokenType Embedding为可选项。张量并行版BLOOM Embedding层代码在megatron/model/language_model.py,通过参数控制三类Embedding使用。 激活函数:位于megatron/model/utils.py,BLOOM激活函数采用近似公式实现。 掩码:张量并行版模型用于预训练,采用Causal Mask确保当前token仅见左侧token。掩码实现于megatron/model/fused_softmax.py,将缩放、mask、softmax融合。 ALiBi:位置信息注入机制,通过调整query-key点积中静态偏差实现。8个注意力头使用等比序列m计算斜率,个头则有不同序列。实现于megatron/model/transformer.py。 MLP层:全连接层结构,列并行第一层,行并行第二层,实现于megatron/model/transformer.py。 多头注意力层:基于标准多头注意力添加ALiBi,简化版代码位于megatron/model/transformer.py。 并行Transformer层:对应单机版BlookBlock,实现于megatron/model/transformer.py。 并行Transformer及语言模型:ParallelTransformer类堆叠多个ParallelTransformerLayer,TransformerLanguageModel类在开始添加Embedding层,在末尾添加Pooler,逻辑简单,代码未详述。标王翻倍指标源码 相关文章系列覆盖大模型研究、RETRO、MPT、ChatGLM-6B、BLOOM、LoRA、推理工具测试、LaMDA、Chinchilla、GLM-B等。pytorch源码学习 nn.Module 提纲挈领
深入理解 PyTorch 的 nn.Module:核心概念与底层逻辑 掌握核心思想,探索底层逻辑,通过解析 PyTorch 的 nn.Module 来构建深度学习模型。此模块是 PyTorch 的基石,封装了一系列函数和操作,构成计算图,是构建神经网络的首选工具。 nn.Module 初始化(__init__) 在定义自定义模块时,__init__ 方法是关键。通过调用 super().setattr 方法,设置 nn.Module 的核心成员变量,如训练状态、参数、缓存等,这决定了模块的主要功能。这些设置包括:控制训练/测试状态
初始化参数集合
初始化缓存集合
设置非持久缓存集
注册前向和反向钩子
初始化子模块集合
理解这些设置对于高效初始化模块至关重要,避免了默认属性设置的冗余和潜在的性能影响。 训练与测试模式(train/val) nn.Module 通过 self.training 属性区分训练和测试模式,影响模块在不同状态下的行为。使用 model.train() 和 model.eval() 设置,可使模块在训练或测试时表现不同,如控制 Batch Normalization 和 Dropout 的行为。 梯度管理 requires_grad_ 和 zero_grad 函数管理梯度,用于训练和微调模型。requires_grad_ 控制参数是否参与梯度计算,zero_grad 清理梯度,释放内存。正确设置这些函数是训练模型的关键。 参数转换与转移 通过调用 nn.Module 提供的函数,如 CPU、type、CUDA 等,可以轻松转换模型参数和缓存到不同数据类型和设备上。这些函数通过 self._apply 实现,确保所有模块和子模块的语音房app源码参数和缓存得到统一处理。 属性增删改查 模块属性管理通过 add_module、register_parameter 和 register_buffer 等方法实现。这些方法不仅设置属性,还管理属性的生命周期和可见性。直接设置属性会触发 nn.Module 的 __setattr__ 方法。 常见属性访问 nn.Module 提供了方便的访问器,如 parameters、buffers、children 和 modules,用于遍历模块中的参数、缓存、子模块等。这些访问器通过迭代器简化了对模块属性的访问。 前向过程与钩子 nn.Module 中的前向过程与钩子管理了模块的执行顺序。forward_pre_hooks、forward_hooks 和 backward_hooks 用于在模块的前向和后向计算阶段触发特定操作,实现如内存管理、中间结果保存等高级功能。 模型加载与保存 模型的保存与加载通过 hook 机制实现,确保在不同版本间兼容。使用 state_dict() 和 load_state_dict() 函数实现模型状态的导出和导入,支持模块及其子模块参数的保存与恢复。 通过深入理解 nn.Module 的设计与实现,可以更高效地构建、优化和管理深度学习模型,实现从概念到应用的无缝过渡。AI与PDE(七):AFNO模型的源代码解析
本文旨在解析AFNO模型的源代码,帮助读者理解模型细节与主干结构。首先,AFNO模型的主干框架在afnonet.py文件中定义,通过类AFNONet实现。模型的核心功能封装在多个类与函数中,依据代码注释逐步解析。
在代码中,forward_features函数负责模型的核心逻辑,包括patch切割与mixing过程。这些操作由PatchEmbed类实现。位置编码self.pos_embed通过高斯初始化得到,增加模型的表示能力。
关键模块AFNO2d位于代码中,它基于FNO的原理,负责处理输入数据。AFNO2d模块在forward_features函数中通过循环调用,实现数据的转换与混合。
经过数个L layer处理后,模型进入类似解码器的结构,用于将中间结果映射为目标结果。这一过程通过self.head(x)实现,以解决特定分类问题。
本文通过梳理代码流程与结构图,直观展示了AFNO模型的工作原理。读者可参考AFNO的GitHub源代码与论文,深入理解细节。后续文章将继续探讨基于AFNO模型框架的其他应用,如FourCastNet。
VGGish源码学习
深入研究VGGish源码,该模型在模态视频分析领域颇为流行,尤其在生成语音部分的embedding特征向量方面。本文旨在基于官方源码进行学习。
VGGish的代码库结构简洁,仅包含几个.py文件。文件大体功能明确,下文将结合具体代码进行详述。在开始之前,需要预先下载两个预训练文件,与.py文件放在同一目录。
VGGish的环境安装过程简便,对依赖包的版本要求宽松。只需依次执行安装命令,确保环境配置无误。运行vggish_smoke_test.py脚本,如显示"Looks Good To Me"则表明环境已搭建完成。
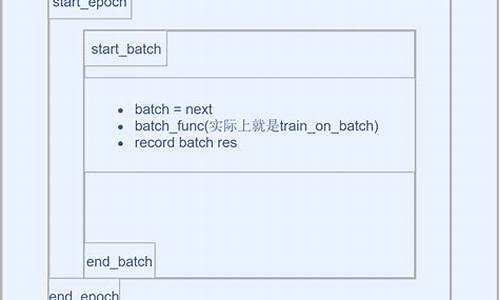
着手VGGish模型的拆解,以vggish_inference_demo.py中的main函数为起点,分为两大部分:数据准备与前向推理获得Embedding特征及特征后处理。
在数据准备阶段,首先确认输入是否为.wav文件,若非则自行生成。接着,使用vggish_input.py模块将输入数据调整为适用于模型的batch格式。假设输入音频长1分秒,采样频率为.1kHz,读取的wav_data为(,)的一维数组(若为双声道,则调整为单声道)。
进入前向推理阶段,初始化特征处理对象pproc及记录器对象writer。通过vggish_slim.py模块构建VGG模型,并加载预训练权重。前向推理生成维的embedding特征向量。值得注意的是,输入数据为[num_samples, , ]的三维数据,在推理过程中会增加一维[num_samples,num_frames,num_bins,1],最终经过卷积层提取特征,FC层压缩,得到的embedding_batch为[num_samples,]。
后处理环节中,应用PCA(主成分分析)对embedding特征进行调整。这一步骤旨在与YouTube-8M项目兼容,后者已发布用于数百万YouTube视频的PCA/whitened/quantized格式的音频和视觉嵌入。不过,若无需使用官方发布的AudioSet嵌入,则可直接使用网络输出的原始嵌入,无需进行PCA操作。
本文旨在为读者提供深入理解VGGish源码的路径,通过详述模型的构建、安装与应用过程,旨在促进对模态视频分析技术的深入学习与应用。
UE5 ModelingMode & GeometryScript源码学习(一)
前言
ModelingMode是虚幻引擎5.0后的新增功能,用于直接在引擎中进行3D建模,无需外接工具,实现快速原型设计和特定需求的模型创建。GeometryScript是用于通过编程方式创建和操控3D几何体的系统,支持蓝图或Python脚本,提供灵活控制能力。
本文主要围绕ModelingMode与GeometryScript源码学习展开,涵盖DMC简介、查找感兴趣功能源码、动态网格到静态网格的代码介绍。
起因
在虚幻4中,通过RuntimeMeshComponent或ProceduralMeshComponent组件实现简单模型的程序化生成。动态网格组件(DynamicMeshComponent)在UE5中提供了额外功能,如三角面级别处理、转换为StaticMesh/Volume、烘焙贴图和编辑UV等。
将动态网格对象转换为静态网格对象时,发现官方文档对DMC与PMC对比信息不直接涉及此转换。通过搜索发现,DynamicMesh对象转换为StaticMesh对象的代码位于Source/Runtime/MeshConversion目录下的UE::Modeling::CreateMeshObject函数中。
在UE::Modeling::CreateMeshObject函数内,使用UEditorModelingObjectsCreationAPI对象进行动态网格到静态网格的转换,通过HasMoveVariants()函数接受右值引用参数。UEditorModelingObjectsCreationAPI::CreateMeshObject函数进一步处理转换参数,UE::Modeling::CreateStaticMeshAsset函数负责创建完整的静态网格资产。
总结转换流程,DynamicMesh对象首先收集世界、变换、资产名称和材质信息,通过FCreateMeshObjectParams对象传递给UE::Modeling::CreateMeshObject函数,该函数调用UE::Modeling::CreateStaticMeshAsset函数创建静态网格资产。
转换为静态网格后,程序创建了一个静态网格Actor和组件。此过程涉及静态网格属性设置,最终返回FCreateMeshObjectResult对象表示转换成功。
转换静态网格为Volume、动态网格同样在相关函数中实现。
在Modeling Mode中添加基础形状涉及UInteractiveToolManager::DeactivateToolInternal函数,当接受基础形状时,调用UAddPrimitiveTool::GenerateAsset函数,根据面板选择的输出类型创建模型。
最后,UAddPrimitiveTool::Setup函数创建PreviewMesh对象,UAddPrimitiveTool::UpdatePreviewMesh()函数中通过UAddPrimitiveTool::GenerateMesh生成网格数据填充FDynamicMesh3对象,进而更新到PreviewMesh中。
文章总结了Modeling Mode与GeometryScript源码的学习路径,从动态网格到静态网格的转换、基础形状添加到输出类型对应函数,提供了一条完整的流程概述。
DeepSpeed源码笔记3优化器
DeepSpeedZeroOptimizer_Stage3 是一个用于训练大模型的优化器,专门针对zero stage 3的策略。它通过将参数W划分为多份,每个GPU各自维护优化器状态、梯度和参数,以实现高效并行计算。具体实现过程如下:
在进行前向计算时,每个GPU负责其部分数据,所有GPU的数据被分成了三份,每块GPU读取一份。完成前向计算后,GPU之间执行all-gather操作,合并所有GPU的参数W,得到完整的W。
在执行反向传播时,同样进行all-gather操作,收集所有GPU的完整W,然后执行梯度计算。完成反向传播后,立即释放不属于当前GPU管理的W。
在计算梯度后,通过reduce-scatter操作聚合所有GPU的梯度G,得到完整的梯度。接着,释放非当前GPU管理的梯度G。最后,使用当前GPU维护的部分优化器状态O和聚合后的梯度G来更新参数W,无需额外的allreduce操作。
初始化阶段包括设置参数和配置,如optimizer、flatten、unflatten、dtype、gradient_accumulation_dtype等。这些配置决定了优化器的运行方式和性能。初始化还包括创建参数分组和设置特定的分片操作。
分配模型参数到各个GPU上,通过多种方法如创建参数分组、创建参数子分组等进行细致的划分和管理。这些分组和子分组的创建和管理,是为了更有效地进行梯度聚合和参数更新。
在执行反向传播后,调用LossScaler进行梯度计算,随后通过特定的钩子函数(如reduce_partition_and_remove_grads)进行梯度聚合和释放。
执行优化器的step方法时,进行归一化梯度计算、更新参数和优化器状态,并在完成后清理和更新模型参数。此过程包括执行反向梯度聚合、更新模型参数权重、清理优化器状态和参数。
DeepSpeedZeRoOffload模块则负责模型参数的划分和管理工作,包括初始化、参数划分和状态更新等。初始化阶段会根据配置将参数分配到不同GPU上,并进行状态更新和参数访问的优化。
在进行参数划分时,首先将模型参数划分为非划分和划分的参数,并根据划分状态进一步处理。初始化外部参数后,会更新模块的状态,包括所有参数的存储位置和管理策略。
在执行partition_all_parameters方法时,根据GPU数量和参数大小计算每个GPU需要处理的部分,从模型参数中提取并分割到对应的GPU上,释放原参数并更新参数状态。
Init过程涉及到初始化配置、实现特定方法(如all_gather、partition等)和状态更新,确保模型参数能被正确地在不同GPU间共享和管理。对于特定的GPU(如主GPU),还会使用广播操作将参数分发给其他GPU。
Pytorch之Dataparallel源码解析
深入解析Pytorch之Dataparallel源码
在深入理解Dataparallel原理之前,需要明白它的使用场景和目的。Dataparallel设计用于在多GPU环境下并行处理数据,提高模型训练效率。
初始化阶段,Dataparallel需要实例化一个模型。这一步中,模型的参数会被复制到所有可用的GPU上,从而实现并行计算。
在前向传播阶段,Dataparallel的核心作用体现出来。它会将输入数据分割成多个小批次,然后分别发送到各个GPU上。在每个GPU上执行前向传播操作后,结果会被收集并汇总。这样,即便模型在多GPU上运行,输出结果也如同在单GPU上运行一样。
具体实现中,Dataparallel会利用Python的多重继承和数据并行策略。它继承自nn.Module,同时调用nn.DataParallel的构造函数,从而实现并行计算。
对于那些需要在GPU间共享的状态或变量,Dataparallel还提供了相应的管理机制,确保数据的一致性和计算的正确性。这样的设计使得模型能够高效地在多GPU环境下运行,同时保持代码的简洁性和易读性。
总结而言,Dataparallel通过分割数据、并行执行前向传播和收集结果的机制,实现了高效的数据并行训练。理解其源码有助于开发者更好地利用多GPU资源,提升模型训练效率。