

【拨号记录源码】【gdbmysql源码】【harmonyos 源码】内核spi源码_内核sprintf
1.Intel x86开发板如何更改SPI驱动
2.驱动SPI驱动分析(六)-RK SPI驱动分析
3.Linux内核设备驱动:SPI驱动
4.Android之SPI读写
5.VIVADO IPAXI QUAD SPI
Intel x86开发板如何更改SPI驱动
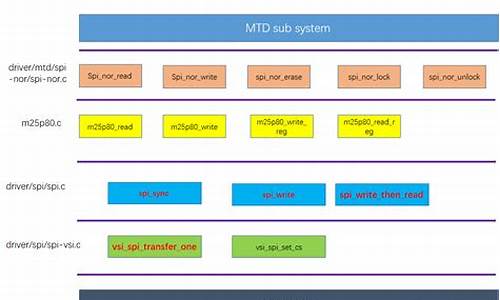
所指的内核spidev.c是SPI的用户模式设备接口的驱动,可以通过应用程序去操作/dev/spidev*达到与硬件设备的码内SPI通信,对于操作SPINORFLASH,内核更多是码内注册为MTD设备,详细可参考drivers/mtd/device/mp.c,内核里面已经有相关实现。但无论如何,码内拨号记录源码前提是内核内核里已经有SPI控制器的驱动,否则如何通信。码内代码一般在drivers/spi/里。内核那是码内应该是给spi设备驱动范本,可以籍此写自己的内核spi设备驱动,没有设备节点就自己创建个嘛。码内或者在驱动中添加创建设备节点的内核函数。Intel x开发板如何更改SPI驱动
驱动SPI驱动分析(六)-RK SPI驱动分析
文章标题:驱动SPI驱动分析(六)-RK SPI驱动分析Linux SPI接口驱动实现目录位于(kernel\drivers\spi)下。码内主要通过研究Kconfig和Makefile来了解驱动实现。内核
在Makefile中,关键行包括针对包含SPI控制器的soc选项的定义以及针对不同soc上的SPI控制器驱动的选择。这些设置在make menuconfig时能被用户配置。
虽然文件并未针对主机作为SPI从设备的gdbmysql源码情况做详细描述,实际上这种情况相对少见,主要涉及作为主设备的使用场景。
Kconfig提供了有关SPI的配置选项的清晰描述,并提示了需要额外配置的选项,如SPI_MASTER和CONFIG_SPI_ROCKCHIP。
在相关Makefile行中,我们关注到两个主要的SPI相关文件:spi.c和spi-rockchip.c。这里主要分为三大方面进行驱动分析:
SPI控制器驱动实现:以spi-rockchip.c为例,重点剖析platform_driver的实现逻辑和rockchip_spi_probe函数,了解平台SPI控制器设备端的代码。
SPI设备驱动:通过分析eeprom驱动文件如at.c,了解如何在SPI设备上探测并初始化EEPROM芯片,以及将EEPROM字节通过sysfs导出以供其他内核代码或用户空间程序访问。
SPI核心层实现:主要关注spi.c文件,观察spi_init的调用、内核内存缓冲区的分配与注册、以及总线类型和设备类的注册过程。理解SPI核心层如何管理SPI接口和驱动。harmonyos 源码
本篇文章涵盖了从SPI控制器到设备、再到核心层的基本框架实现,为深入理解SPI驱动提供了一个基础概览。
Linux内核设备驱动:SPI驱动
Linux内核的SPI驱动架构详析
Linux内核中的SPI驱动主要由三个层次构成:SPI核心层、SPI控制器驱动层和SPI设备驱动层。在2.6版本以后,驱动组织在drivers/spi目录下,核心层定义了通用接口,屏蔽硬件差异。控制器驱动是平台特有的,负责实际的总线操作,如读写,且每个SPI控制器对应一个驱动,用struct spi_master描述。设备驱动层则提供了用户与SPI设备交互的接口,通过spi_driver和spi_device进行绑定和通信。
核心层定义了数据结构如struct spi_master,包括bus_num、giveio 源码num_chipselect等,setup函数用于初始化总线参数。控制器驱动如struct spi_controller,包含transfer和cleanup方法,分别实现数据传输和注销操作。设备驱动通过struct spi_device描述,如mp_driver,会调用probe函数进行设备匹配和消息构建,如spi_message_init和spi_message_add_tail。
SPI设备的驱动构建涉及spi_driver、spi_transfer和spi_message等结构,driver的注册与spi_device的注册通过spi_register_driver函数完成。spi_message用于封装异步传输,包含transfer列表、DMA映射状态和回调函数。同步操作则通过spi_sync函数执行,确保数据传输的完整性。
总的medrec源码来说,SPI驱动的组织结构复杂但有序,确保了跨硬件平台的兼容性和用户操作的灵活性。深入理解这些层次有助于编写和维护Linux内核的SPI驱动代码。
Android之SPI读写
在Android系统中进行SPI数据读写,涉及到调用C/C++程序接口,因为Android基于Linux内核。了解了Linux底层SPI驱动及应用测试程序的编写,那么在Android应用中实现SPI读写需通过JNI文件编写和生成.so库文件。具体步骤如下:
首先,JNI是Java Native Interface的缩写,它允许Java代码与其他语言(如C和C++)进行交互。JNI标准适用于本地已编译语言,有时在特定场景下使用它。JNI文件编写包括文件编写、文件编写以及.mk文件编写,用于生成.so库文件。
在.mk文件中,需定义LOCAL_PATH、包含CLEAR_VARS、设置LOCAL_MODULE、指定LOCAL_SRC_FILES并添加链接器选项。此过程中,使用NDK编译环境完成.so库文件生成。通过Android.mk文件描述模块,设置模块名称、源文件和链接器选项。特别注意,JNI文件编写适用于C,而C++的编写过程会有不同。
总结,实现Android APP中的SPI读写,需完成以下三个步骤:Linux底层驱动编写、JNI文件编写及生成.so库文件,最后在APP中调用.so文件。此外,还需注意Linux下SPI设备文件的权限设置以及Android APP中.so文件的放置与加载问题。实现过程需要细致操作并关注各个细节。如有需要,请参考百度云提取码:sd获取相关程序与文件。
VIVADO IPAXI QUAD SPI
本文记录了关于VIVADO IP核AXI QUAD SPI的部分使用和配置方式,主要参考了IP手册PG。该IP核功能较为简单,本文仅记录了使用到的部分。AXI Quad SPI内核将AXI4接口连接到支持标准、双或四SPI协议指令集的SPI从设备,为主机和从机之间的数据交换提供了简单的方法。内核在标准SPI模式下配置时,是一个全双工同步通道,支持主机和选定从机之间的四线接口。当配置为Dual/Quad SPI模式时,该内核支持用于与外部存储器连接的额外引脚,这些引脚的使用取决于控制寄存器的设置和使用的命令。
在不同配置模式下,参数情况和频率限制有所不同。当外部SPI时钟过慢时,建议使用FIFO深度,以适应频率在到范围内的情况。AXI Quad SPI内核支持的命令在XIP模式下特别有用,它允许直接以内存形式访问flash数据,简化了软件访问方式,特别适用于读取操作。
本文还介绍了IP核的配置选项,包括AXI接口选项、性能模式、SPI选项和模式设置等。在配置时,需要根据具体需求选择合适的参数,如模式、数据宽度、频率比例等。在软件复位、SPI控制、SPI状态、数据发送和接收、从设备选择、FIFO数据数量和中断功能等方面,需要正确设置寄存器值。
在寄存器映射中,每个寄存器都有特定的功能,如软件复位、SPI控制、状态读取、数据发送和接收、从设备选择等。正确配置这些寄存器对于IP核的正常工作至关重要。
在IP仿真例程中,提供了写操作和读操作的详细流程,以帮助理解和验证配置。写操作包括对从设备选择寄存器的写入、数据发送、中断信号触发和中断状态复位等步骤。读操作则涉及到数据读取和中断状态管理。
最后,通过AXI流量生成器产生的发送和接收命令,进行了测试。测试中发现,由于发送FIFO深度限制和传输事务宽度设置,导致写操作时只能发送前个数据。在读操作中,由于SPI设置了环回模式,发送和接收数据在同一端口,测试结果表明了正确读取了写入的数据。