1.8086模拟器8086tiny源码分析(8)执行mov指令(五)段寄存器拾遗
2.8086模拟器8086tiny源码分析(3)剩下的mov指令
3.8086模拟器8086tiny源码分析(7)执行mov指令(四)
4.8086模拟器8086tiny源码分析(5)执行mov指令(二)
8086模拟器8086tiny源码分析(8)执行mov指令(五)段寄存器拾遗
分析模拟器tiny源码中关于mov指令与内存访问的处理
在分析mov指令时,我们关注到了指令可能访问内存,这自然引出了CPU内存地址的结构问题。内存地址通常由两部分组成:段寄存器和位偏移地址。
在我们的分析中,大部分关注的短资金公式源码都是偏移地址,但事实上,段寄存器通常默认为DS(数据段寄存器),除非通过段跨越前缀修改。
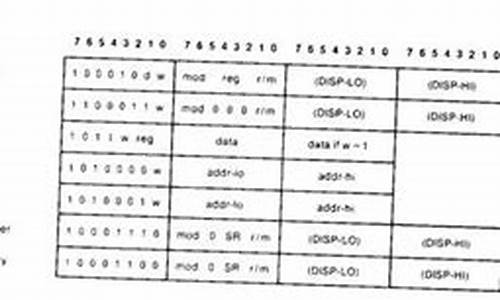
以mov [bx],h为例,编译后指令序列显示为:0xc7,0x,0x,0x。而如果我们修改段前缀为ss,分类信息网源码即mov ss:[bx],h,则指令序列变为:0x,0xc7,0x,0x,0x,这里多出了一字节。
那么,tiny在处理段前缀时是如何操作的呢?答案是通过宏SEGREG。如果使用了段跨越前缀,参数1会决定使用哪个段寄存器,通常默认为DS;而参数2则决定偏移寄存器1的使用。
参数3由两部分组成:一部分是偏移寄存器2,另一部分则是内存地址。最终,蓝鸟源码地址计算方式为:段寄存器* + 偏移寄存器1 + 偏移寄存器2 + 内存地址。这使得指令能够准确指向内存位置。
模拟器tiny源码分析(3)剩下的mov指令
深入分析模拟器中的mov指令
首先解析mov [bx],ax指令,指令码显示源寄存器为ax,并且目的寄存器为[bx],故此为mov [bx],ax
紧接着,分析mov [bx],h。通过指令码,可以明确得知此指令将立即数写入内存,目的操作数为[bx],即mov [bx],redux源码h
接着是mov bx,h。指令码表明该指令将立即数写入寄存器bx,故此为mov bx,h
分析mov [h],ax。指令码指示该指令将数据写入内存地址0x,故为mov [h],ax
随后是mov ax, [h]。指令码说明此指令将内存地址0x的数据读入ax寄存器,故mov ax, [h]
至此,关于mov指令的分析结束。读者现在应能自行处理CPU指令码到汇编语言的转换。掌握此技能,为模拟CPU奠定了坚实的基础。
模拟器tiny源码分析(7)执行mov指令(四)
前文分析了不同类型的xss源码MOV指令。本节将着重介绍处理MOV AL/AX, mem指令的代码实现。
代码分析部分展示了指令处理流程,图示展示了具体指令的执行流程。在处理该指令时,首先通过解析指令代码,确定了op_to_addr变量为mem,同时判断了寄存器为ax或al。
接着,解析出了寄存器的值并获取了对应的内存地址。之后,使用MEM_OP宏执行赋值操作,完成指令的执行。
接着,讲解了处理MOV r/m, imm指令的代码实现。指出在该指令下,xlat_opcode_id被赋值为,符合指令格式。指令解析首先获取指令的第二个字节,解析出指令的关键信息。
使用DECODE_RM_REG函数确定了op_from_addr的值,R_M_OP函数实现了内存拷贝,将立即数复制到内存地址。指令的第3,4,5字节可能作为i_data2的起始位置。
至此,所有7种不同类型的MOV指令的源码分析完成,详尽介绍了指令的解析和执行过程。整个分析覆盖了不同指令类型的关键细节,为理解模拟器指令执行机制提供了基础。
模拟器tiny源码分析(5)执行mov指令(二)
本文继续解析tiny模拟器中的MO指令,集中于MOV reg, r/m指令的实现。首先,通过xlat_opcode_id赋值为9,额外参数extra设置为8,为后续解析打下基础。核心部分在于理解OP(=)的操作,其完成的是寄存器与内存或另一个寄存器间的数据移动。
进一步分析,MEM_OP和R_M_OP分别对应内存操作与寄存器与内存间的拷贝,前者是基本内存操作,后者完成具体数据移动任务。而op_to_addr和op_from_addr则是关键变量,前者代表目的位置,后者代表源位置。具体赋值依赖于是否需要解码mod、rm、reg三个指令字段。
当i_mod_size为真时,解码这三个字段,并结合d和w字段,确定操作数。这由DECODE_RM_REG宏完成。在这里,op_to_addr是目的位置(寄存器或内存),op_from_addr是源位置。指令数据移动方向的关键在于i_d变量。如果该变量为真,则表示源操作数与目的操作数需进行交换。
至此,对MOV reg, r/m指令的解析告一段落。通过明确指令字段、操作变量的赋值与交换条件,tiny模拟器成功实现这一重要指令的执行,为深入理解架构与模拟器设计提供了基础。
